孕育中的三维水平井修正轨道设计的二次函数法和弹性管柱插连法
2020-09-04 06:38李子丰
石油钻采工艺 2020年3期
李子丰
燕山大学石油工程系
原始水平井设计轨道一般是二维的[1-4],以减少设计难度和施工难度,但在很多情况下也采用三维的[5-8]。无论原始设计是二维的还是三维的,施工过程的修正井眼轨道设计(也称待钻井眼轨道设计)都是三维的。三维水平井修正轨道设计的已知参数是当前井底的三维坐标值和井斜角及方位角,入靶点的三维坐标值和井斜角及方位角。由于入靶点的限定条件是入靶点的三维坐标值和井斜角及方位角,并没有限定井斜角为90°,为此该设计方法适用于一切限定入靶点的三维坐标值和井眼方向的定向井。目前,已有的三维修正水平井轨道设计方法是斜平面圆弧-直线-斜平面圆弧法[9],即双空间圆弧+直线法。这种设计方法是针对滑动送钻导向钻井系统[10-13]提出的。现在,旋转导向钻井系统[14-15]应用得越来越多,这种方法设计出来的轨道是否还是最优?有没有更好的设计方法?为了与旋转导向钻井系统的发展相适应,笔者提出了2种三维水平井修正轨道设计方法——二次函数法和弹性管柱插连法,介绍其物理模型、数学模型,以及待解决的问题和潜在价值。
1 现有斜平面圆弧-直线-斜平面圆弧法
图1描述了三维水平井的井口(坐标原点)、靶区[16]、设计轨道与实钻轨迹之间的关系。由于滑动送钻导向钻井技术先于旋转送钻导向钻井技术出现,并且每趟钻的导向钻具上的弯角基本恒定,易于钻出曲率值基本恒定的井眼,为此,最先出现的三维水平井修正轨道设计方法是斜平面圆弧-直线-斜平面圆弧法[9]。
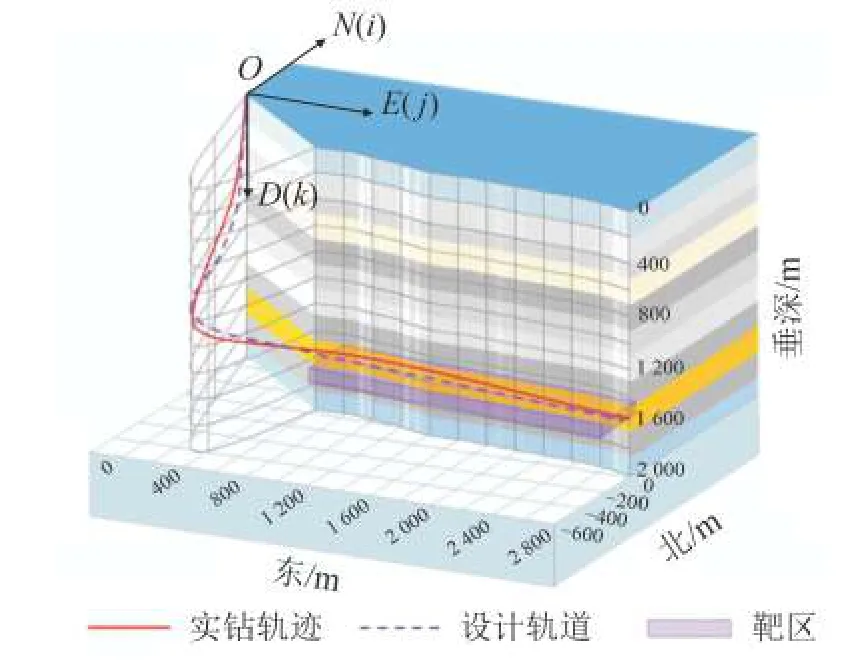
图1实钻轨迹与设计轨道和靶区Fig.1 Actual trajectory,designed trajectory and target
1.1 物理模型
该模型可以用图2所示通过两个喇叭口的拉线表 示。图 中,A点 为 当 前 井 底,N1,E1,D1,α1,φ1为A点的北坐标、东坐标、垂深、井斜角和方位角;B点为入靶点,N2,E2,D2,α2,φ2为B点的北坐标、东坐标、垂深、井斜角和方位角;R1为第一圆弧段曲率半径;R2为第二圆弧段曲率半径。在A点,以曲率半径R1对应的圆弧段绕当前井眼轴线旋转一周,形成一个喇叭口;在B点,以曲率半径R2对应的圆弧段绕目标段井眼轴线旋转一周,形成另一个喇叭口;将一无重绳索穿过已钻井筒和目标井筒及两个喇叭口后拉直,则绳索形状即为设计的井眼轨道。
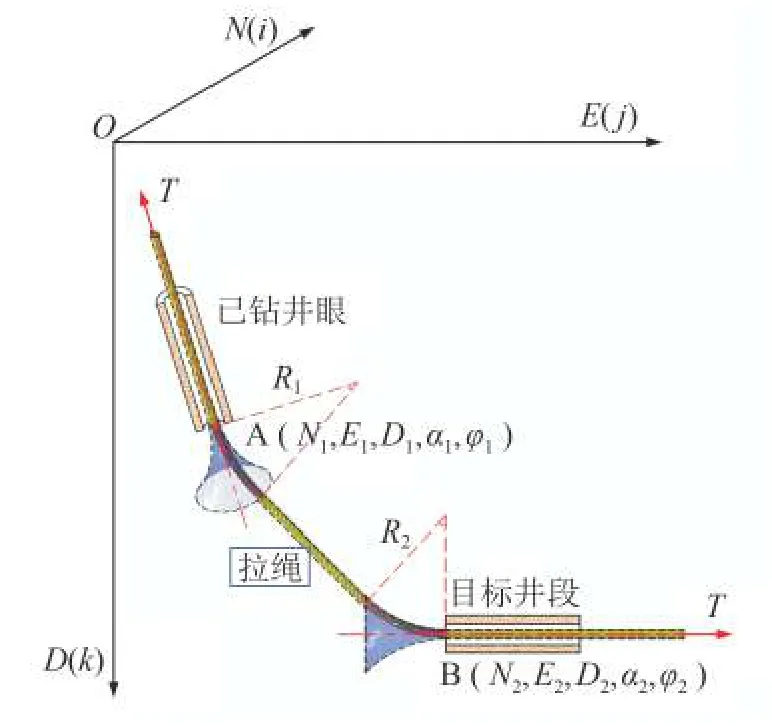
图2两个喇叭口-拉绳法物理模型Fig.2 Physical model of two bells-rope method
1.2 数学模型
文献[9]给出了完整的数学模型及求解方法。
1.3 应用概况
几乎所有的三维水平井修正轨道设计都在采用该方法。
2 二次函数法
2.1 物理模型
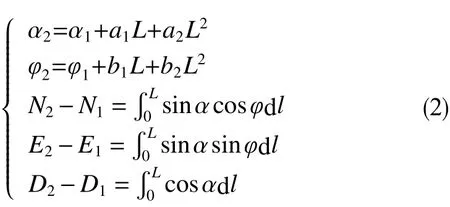
二次函数法中,井斜角和方位角都是A点到修正井眼所在点井眼长度的二次函数,在当前井底和入靶点与井眼轨道相切,如图3所示。
2.2 数学模型
已知条件为当前井底的三维坐标值、井斜角和方位角,入靶点的三维坐标值、井斜角和方位角。若考虑提前入靶的情况,则将B点沿水平井段轴线左移。

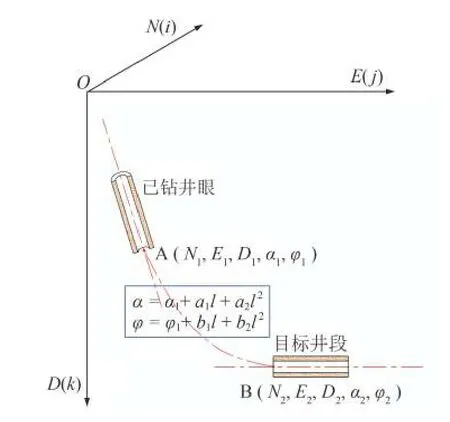
图3二次函数法物理模型Fig.3 Physical model of quadratic function method
假设式中,α为井斜角,°;φ为方位角,°;l为从A点开始沿井眼轨道到所在点的长度,到达B点时,l=L,m;L为A点到B点的轨道长度,是个未知量;a1,a2,b1,b2为待定系数。共5个未知量,需要5个独立方程才能确定,上下两点各有5个参数,恰好可以列出5个独立方程。
2.3 待解决的问题
求解式(2)中的a1,a2,b1,b2和L。
3 弹性管柱插连法
3.1 物理模型
在该模型中,将弹性钻柱或套管柱两端分别插入上端已钻井筒和目标水平井筒,在管柱两端加上拉力,当前井底处的拉力为TA,入靶点处的拉力为TB,则管柱中心线即为设计的井眼轨道,如图4所示。
3.2 数学模型
已知条件:当前井底的三维坐标值、井斜角和方位角,入靶点的三维坐标值、井斜角和方位角。若考虑提前入靶的情况,则将B点沿水平井段轴线左移。
3.2.1 微分方程
如果管柱轴线用r=N(l)i+E(l)j+D(l)k表示,由于弹性管柱处于静态、没有扭转、轴向变形不影响计算结果,油气井杆管柱动力学基本方程[17-18]简化为
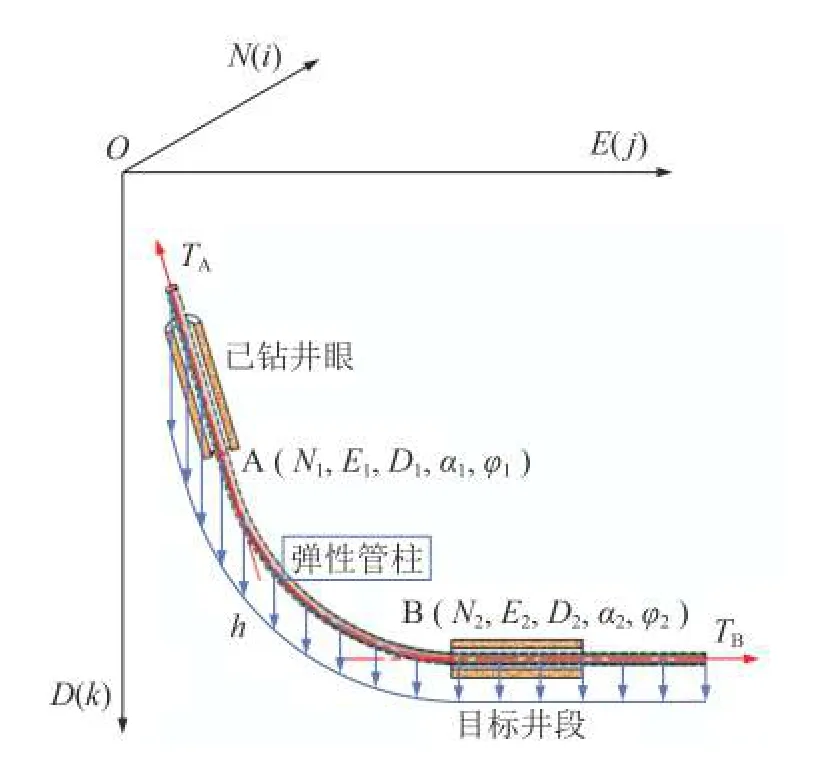
图4弹性管柱插连法物理模型Fig.4 Physical model of elastic string connection method
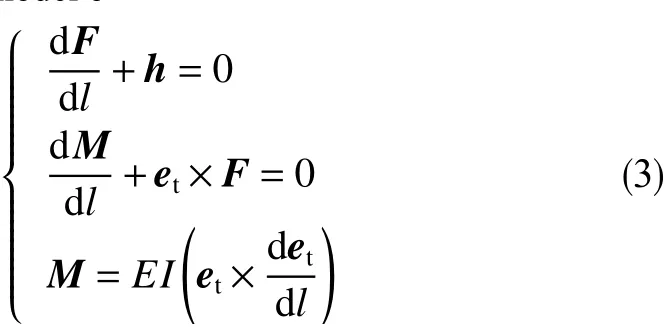
式中,F为管柱的内力,N;h为单位长度管柱上的重力,N/m;M为管柱的内力矩,N·m;E为弹性模量,N/m2;I为截面惯矩,m4;et为管柱变形线的切线方向的单位向量,且

其中
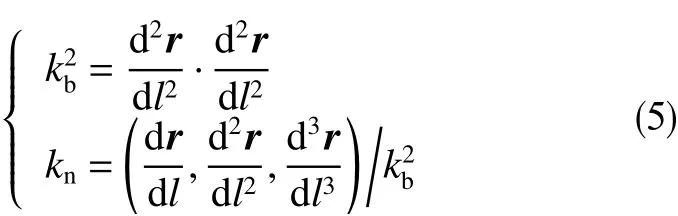
式中,en和eb分别为管柱变形线的主法线方向和副法线方向的单位向量;kb和kn分别为r点的曲率和挠率,m−1。
3.2.2 边界条件
(1)当前井底。
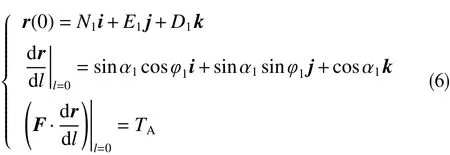
(2)入靶点。
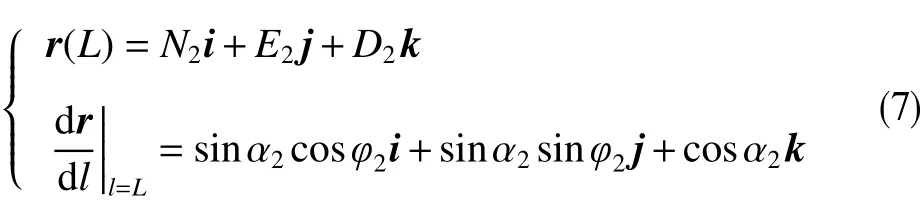
这是一个空间几何非线性梁问题。
3.3 待解决的问题
求解式(3)~(7)组成的数学模型,得到r=N(l)i+E(l)j+D(l)k的具体数值或表达式。
4 待进行的3种三维水平井修正井眼轨道设计结果的比较
(1)适应钻进方法的比较。斜平面圆弧-直线-斜平面圆弧法适合滑动几何导向钻进;二次函数法和弹性管柱插连法适合旋转导向钻进。
(2)设计井段长度的比较。
(3)设计井段施工难度的比较。
(4)设计井段和水平井段施工中,摩阻的比较。理论上,在某一特定条件下,管柱在弹性管柱插连法设计的井筒内,与井壁的接触压力全为0,这一点与悬链法[19]类似。
5 待进行的实验验证
(1)弹性管柱插连法室内实验。比较理论设计结果与实验结果。
(2) 3种方法设计结果的现场实钻验证及对比。
6 结束语
二次函数法和弹性管柱插连法必将成为新的三维水平井修正轨道设计方法。两种方法的设计理念和数学模型已经建立,下一步的工作是求解这两种方法的数学模型、编程和现场应用。
猜你喜欢
结构工程师(2022年2期)2022-07-15
云南化工(2020年11期)2021-01-14
中国典型病例大全(2021年15期)2021-01-10
河北理科教学研究(2020年2期)2020-09-11
空间科学学报(2020年4期)2020-04-22
建筑科技(2018年2期)2018-10-25
现代计算机(2018年19期)2018-08-01
机械研究与应用(2018年3期)2018-07-11
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
试题与研究·教学论坛(2016年16期)2016-07-02