西门子6RA80在铝材冷轧机直流传动励磁改造中的应用
2021-09-14 09:02王西成祝德勇
铝加工 2021年4期
王西成,戢 亮,祝德勇,张 宏
(西南铝业(集团)有限责任公司,重庆 401326)
0 前言
随着信息技术和电子产业的飞速发展,新的工控产品功能越来越强,稳定性越来越好,部分老旧设备因种种原因存在众多对生产和产品不利的因素和缺陷。例如某些老旧1850 mm铝材冷轧机的主电机、开卷、卷取直流电机驱动是ABB公司上世纪80年代的PAD控制系统,电枢部分是SPZAD 06系列功率单元,励磁单元是外置式ASD6401模块[1],且设备投产时间久远,早已超过产品生命周期,加上备件获取困难,技术支持也极其有限,仅靠有限的修复件维持运行。元器件老化导致系统稳定性、控制精度及响应速度等方面性能变差,特别是电机在弱磁段运行时励磁电流不能及时跟随电枢电压的变化进行准确地调整,时常导致电枢过压故障。传动故障不仅影响生产连续稳定运行,降低效率,增加生产成本,对全油轧制的高速轧机来说还存在很大的火灾风险。为了确保设备及生产的正常、安全运行,必须寻求一种合适的传动升级方案来彻底解决该问题。
鉴于此,本文以上述1850 mm冷轧机为例,结合西门子6RA80传动装置特点,提出了用6RA80直流传动的电枢回路替代原励磁单元为直流电机提供可变励磁电流的方案,以期为该类轧机的改造升级探索出一条有效的解决途径。
1 改造思路及6RA80特点
PAD直流传动装置与上一级PLC之间的信号交换用的是通讯方式,但该轧机控制系统(I14)的PLC通讯协议较为特殊,无法实现与当前主流传动装置的通讯,在不改造整个电控系统的情况下很难实现传动装置的整体改造。而励磁单元ASD与电枢回路间的信号交换都是用电压电流信号,相对独立,具备单独改造条件[2]。新的励磁单元要实现原励磁单元的功能必须具备以下条件:(1)能实现与电枢控制单元及上级系统控制有关的全部信号的匹配和交换;(2)具有电流闭环控制、电枢反电势计算功能。
6RA80传动装置是西门子生产的新一代直流调速器,与上一代产品相比在功能、质量以及可靠性方面都有很大提高。它把SIMOREG DC-MASTER的优势与SINAMICS系列的优点结合在了一起,具有功能齐全、信号连接方便、辅助供电灵活、结构紧凑等优点,在工业自动化控制领域和工厂设备改造中有着广泛应用[3]。其电枢回路采用的是一个(2象限)或两个(4象限)三相全控桥式整流电路将三相交流电转换成可控的直流电源[4],系统控制模块带有电流闭环控制和反电势计算功能,并具有很高的运算速度,符合直流电机励磁单元的要求。
根据对6RA80装置和励磁单元ASD的对比分析,只需将轧机传动电机的励磁绕组接到6RA80装置的电枢输出回路上,通过硬接线实现与电枢控制单元之间信号的匹配和交换以及与系统控制有关的联锁功能;然后再通过修改内部控制参数及算法实现电流闭环控制和自动弱磁功能,辅以合适的控制电路,即可实现用6RA80装置电枢整流回路替代励磁单元为直流电机提供可变励磁电流的功能。所以,确定采用6RA80传动装置作为励磁电流发生器替代原ASD励磁单元,以解决设备老化、故障率高及备件保供等问题。
2 硬件设计
不可逆轧机直流传动电机运行时不需要改变励磁电流方向,所以从实用和经济角度考虑选用了2象限不可逆的直流传动装置,型号为6RA8025-6DS22-0AA0,电枢电流60 A。为了减小整流对电网的谐波干扰,在进线侧加进线电抗器;为了防止励磁绕组产生过电压,在直流侧加双向瞬变抑制二极管。电气控制原理图如图1所示。
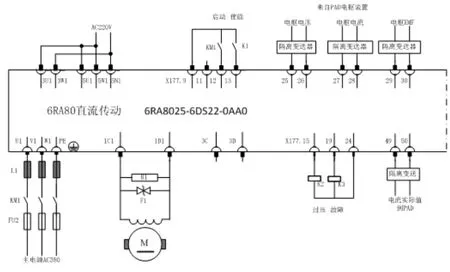
图1 励磁单元改造原理图
3 控制功能的实现
装置安装完毕后进行送电前的检查,使用西门子传动软件STARTER来完成调试。首先使用STARTER建立项目,配置驱动设备(注意:配置时STARTER必须处于离线模式),选择设备型号为6RA8025-6DS22-0AA0。
3.1 主要参数设置
以开卷电机为例,其主要参数设置如下:(1)p50076[0]=58(装置电枢电流60 A,开卷励磁电流34.8 A);(2)p50082[0]=23(设置为外部励磁单元,封锁装置本身的励磁输出);(3)p50084[0]=2(电流/转矩控制);(4)p50100[0]=34.8(将开卷励磁电流34.8A设置为装置的额定电枢电流);(5)p50102[0]=34.8(开卷励磁电流34.8A,用于弱磁计算);(6)p50103[0]=2.5(开卷励磁电流最小电流,弱磁计算极限保护);(7)p50616[0]=52107(将PAD电枢装置发送的EMF值作为EMF控制实际值)。
本次改造是利用6RA80装置的电枢回路作为直流电机励磁的电流源,不需要装置本身的励磁输出,所以设置p50082=23来封锁装置的励磁输出。因PAD电枢单元与6RA80的生产年代及厂家不同,信号定义存在差异,为便于计算需要将接收的电枢电压、电流和EMF以及输出的电流实际值信号进行规格化(以EMF值为例,如图2所示)。

图2 电枢EMF在6RA80中的规格化
3.2 电流闭环控制的实现
电流的闭环控制使用的是6RA80传动装置电枢控制回路的标准控制逻辑[5],如图3所示。为了后续的计算精准,要对电枢电流调节的PI参数进行优化。控制电机速度在弱磁点(开卷机速度在30.4%)之下,在反电势调节还没起作用、电枢电流输出为恒值时,开启STARTER软件中Device trace的测量功能记录电枢电流的变化情况,不断调节电枢电流控制的PI参数,观察电枢电流输出情况直至输出稳定;为减少扰动对电流控制的影响,设置p50153=3激活电枢前馈功能。

图3 电流闭环控制功能图
3.3 弱磁控制功能的实现
根据直流电动机的转速公式n=Ea/CeΦ=(U-IaRa)/CeΦ(其中Ea为电机电动势,U为电枢电压,Ia为电枢电流,Ra为电枢电阻,Ce为常量,Φ为磁通)可知:当电机电枢电压达到额定值时再想继续提高电机转速,只有降低电机励磁电流,减少励磁磁通量[6]。6RA80 装置励磁控制模块中的磁场电路闭环控制(EMF闭环控制)具有反电势计算及闭环控制功能,可以实现弱磁控制功能[5],如图4所示。
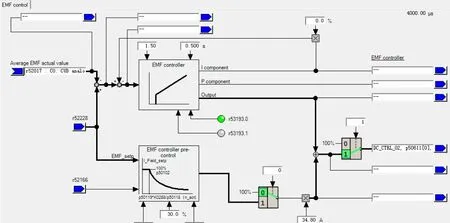
图4 EMF闭环控制功能图
弱磁是为了实现在电机的电动势恒定的前提下持续提升电机转速的目的,为了让反电势调节器对电动势进行闭环控制,需要得到实际的电动势值,但电机的电动势不能直接测量,只能通过计算得到。从电动势方程Ea=U-IaRa可知,电机电动势等于电枢电压减去线路压降的值,为了计算实际的电动势反馈,我们需要得到电机的电枢电压、电枢电流和电枢电阻三个参数。电机的电枢电阻在PAD装置优化时已获得,所以需将PAD电枢装置中检测的电枢电压和电流通过模拟量实时传送到6RA80装置来完成电机电动势的计算。
3.4 励磁特性曲线确定和PI参数优化
为了提高弱磁时的励磁电流响应速度和准确性,需要确定电机的励磁特性曲线,并对电枢电流控制和EMF闭环控制的PI调节参数进行调整优化。由于该装置未使用本身的励磁电流输出所以无法进行励磁自优化,只有通过手动方式计算励磁特性曲线和优化PI参数。
从电机弱磁点开始,逐步提高电机速度给定到电机速度的100%,过程中记录不同磁通量时对应的励磁电流值(每个点至少记录3次,求其平均值),将其转换成百分数并对应填写到p50120-p50139中,从而得到电机的励磁特性曲线[3]。
确定励磁特性曲线之后,设定电机运行速度在弱磁点之上,每次给1%速度阶跃(增加或减少),观察电机励磁电流和电机电枢电压变化情况,手动调节装置EMF控制器的PI参数,也可根据需要微量调整电枢电流控制的PI参数,观察弱磁时段的装置电枢电流输出曲线直至电流输出最优化。手动优化调整后弱磁阶段电流输出平稳,见图5。

图5 EMF闭环控制弱磁时曲线记录
4 改造效果
励磁电流在反电势计算和电枢电流控制双闭环控制下,其调节精度和跟随性都得到了很大的提高,实现了励磁电流的快速稳定调节。在进入弱磁点和弱磁阶段时电机的转速变化平滑,未见明显的振荡或跟随滞后问题发生。两年的稳定运行也证明了用6RA80替代原励磁单元的方案可行。
与改造前相比,新装置稳定性更好,控制精度更高,保护功能更完善,参数设置更方便。同时还较好地解决了因故障频发带来的火灾风险,延长了设备使用寿命,为工厂创造了很高的经济效益。
5 结束语
此次励磁改造是一次大胆尝试,突破了一套传动系统只能使用一家产品的观念限制。通过分析ABB、SIEMENS两个装置作为直流电源的特点,从原理入手找出两个产品的共同点,结合旧系统中数据传输方式,避开了老设备通讯协议不开放问题,实现了用6RA80直流传动的电枢回路替代原ABB励磁单元为直流电机提供可变励磁电流的功能,较好地解决了原励磁传动故障多发问题。
随着信息技术和电子产业的飞速发展,新的工控产品功能越来越强,稳定性越来越好,老设备的升级改造已成为必然。由于厂家、设备以及开发人员的原因,老设备通讯协议的独立性和保密性导致在新旧设备的衔接上所遇到的问题会很多。只有创新思路,大胆尝试,从基本原理入手,找出不同产品的共同点作为升级改造的突破点,突破厂家与品牌限制才能更好地解决老设备升级改造问题。
猜你喜欢
大电机技术(2022年3期)2022-08-06
北京航空航天大学学报(2022年5期)2022-06-06
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
防爆电机(2022年1期)2022-02-16
中学物理·高中(2016年12期)2017-04-22
现代电子技术(2016年22期)2016-12-26
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
新高考·高一物理(2015年6期)2015-09-28