
山林区机载LiDAR地面数据获取探析
2022-05-12 20:24唐久清柳学权唐海建
企业科技与发展 2022年2期
唐久清 柳学权 唐海建


【摘 要】山林地区地形陡峭复杂,植被覆盖率高,机载激光LiDAR是获取该类地区地面数据的一种有效方式,但目前从点云数据中分离出地面数据仍是一个难点。文章将机载LiDAR数据基于高程信息,通过选取地面种子点和一定的邻域坡度进行滤波处理后,与差分定位实测的特征点位相融合,从而获取DTM;并通过模型的精度检测,验证了数据的精度基本达到了测绘标准的要求。
【关键词】机载LiDAR;山林;滤波;DTM
【中图分类号】TP79 【文献标识码】A 【文章编号】1674-0688(2022)02-0117-03
0 引言
三亚地处我国南端,属热带季风气候,热带植被密集茂盛,覆盖率达90%以上,获取这些地区的地面数据一直都是测绘领域的难点。目前,单点定位技术,移动难、通视差、信号差;而航空摄影测量技术在此类地区获取的数据精度又比较低,无法达到实用标准。
近年来,测绘领域出现了一种高新技术——机载LiDAR技术,它具有数据获取快捷、准确度高的优势,是获取精确的山林区空间数据的理想方法;但是,激光LiDAR数据采集包括地面、植被等各种物体反射的所有回波信息,所以必须对点云数据进行滤波分类处理,才能获取有效的地面数据[1]。目前,地形复杂的山林区的激光LiDAR点云数据分类处理,仍是应用热点,也是难点[2]。
常用的滤波方法有基于数学形态学、基于坡度方法及基于曲面拟合的滤波方法[3]等。基于数学形态学的滤波方法容易丢失很多细节地形;基于坡度的滤波方法根据两点的距离和高程差阈值确定点类别存在一定的局限性,不能适应剧烈变化的地形;基于曲面拟合的滤波方法对拟合半径的依赖性大。在综合比较各类滤波方法的基础上,根据本项目的实际情况,本研究提出了基于数学形态学与基于坡度相结合的滤波方法。此外,为了提升特征位置的地形数据的精度,本研究进行了特征点位的提取,并把差分定位固定解采集的离散高程数据融入滤波完成后的地面点云,生成DTM。
1 项目背景
本项目位于三亚市中部,属于高山丘陵区,降雨丰沛,相对地面海拔约300 m。项目面积约5 km2,主要有热带雨林和果园等地类,约50%的区域是热带雨林区,植被郁郁葱葱,藤蔓密布,树木高度为5~10 m,植被覆盖率达90%以上;果园(主要种植杧果和木瓜)面积约占40%,杧果地的植被覆盖率为30%~50%,木瓜地植被覆盖率为70%~80%;还有少量的水库区域,面积约占10%。
本项目的主要任务是获取作业区域(水库及周围山体)约5 km2的DTM成果(高程成果精度不低于1∶500地形测量),用于山体坡度分析。测区植被密集,特别是热带雨林区,通行困难,采用人工RTK采集数据,不仅需要开辟道路,耗工耗时,而且有些地方地势低洼,是网络信号覆盖盲区,无法准确地采集到有效数据;倾斜摄影也不易拍摄到真实的地面数据且色彩光线散射,精度不高;而激光LiDAR在林区有一定的穿透性,采集数据具有独特的优势。对比分析上述各种技术的特点后,最终采用机载LiDAR获取项目区数据。
2 技术路线
本项目采用飞马D2000無人机,设置仿地飞行航线,相对地面高度为120 m,挂载飞马机载D-LiDAR2000模块采集地面LiDAR数据,同时采用正射相机采集整个测区的光学影像,用于辅助地面植被覆盖效果分析。
机载激光LiDAR采集的点云十分密集,约180点/m2,数据大量冗余。因此,对数据1 m空间网格单元进行抽稀;抽稀后,对点云进行分类处理,分离出地面点和非地面点,分类的过程就是数据滤波,滤波是获取数字地面模型的关键技术。
目前,大多数滤波算法适用于处理地势平坦、植被稀疏地区的LiDAR点云数据。相对于地势平坦的地区,山林地区地形复杂、地势起伏大,地面点云数量相对较少,为了提高滤波可靠性,本研究利用数学形态学和坡度滤波相结合的方法,即综合运用2.5D栅格和植被过滤的方法,有效地提高了山林植被密集区的滤波效率。此外,为了提升特征位置的地形数据精度,本研究进行了特征点位的提取,并把单点实测的数据融入滤波完成后的地面点云,生成DTM。具体技术路线如图1所示。
3 数据处理具体流程
3.1 数据处理软件
本项目Lidar数据滤波处理采用RiSCAN PRO软件,该软件是Riegl公司研发的激光点云后处理软件,可以处理地面站、车载和机载激光数据,有点云拼接、抽稀、合并、过滤、构建TIN,以及绘制等值线等功能。
数据建模、效果分析运用的是Geomagic软件,该软件是一款专业的点云建模软件,曲面建模编辑非常强大,有各种诸如点云去噪、平滑及抽稀等功能。
3.2 点云去噪抽稀
整个项目共采集约10.5亿点,由于数据量巨大,直接过滤植被计算时间较长,因此先按1 m空间单元格、八叉树抽稀的方法对点云数据进行去噪抽稀,进行去噪抽稀后的点云数量约2 000万点。
3.3 种子点选取
由于激光的穿透性和多次回波数据,所以经过抽稀后,在植被覆盖区域,空间上仍有多个高程值,即有可能是植被顶部或中间的值,地面点处于最低点,最低点一般为地面点或低矮的植被点,最低点可以作为地面的种子点。实现最低点过滤目标的滤波方法主要有数学形态学滤波。该方法通常分为3个步骤:①首先确定区内相邻的两个地面点的最大间距M,设置一个移动滤波窗口,窗口的大小大于M;②采用移动的滤波窗口过滤整个区域;③窗口的高程由窗口内最小值替代。这种采用规则网格数据结构的运算速度快、操作比较简单[4]。
RiSCAN软件的2.5D光栅过滤器是基于数学形态学的滤波方法,按照设定的规则,过滤掉空间上多个高程值的点,最终可以获取取最高、最低或平均值点云的结果。经过观察发现,本密林区的地面点,在平面上最大的两个地面点的间隔在15 m以内。因此,本研究最终选择设置平面上长和宽为15 m的平面规则网格,作为移动滤波窗口过滤整个实验区域,然后采用最低值过滤的方法选取点,这样选取出来的点可作为地面的种子点,地面种子点在单规则网格中的空间位置如图2(c)所示。
3.4 植被滤除
经过上述两个步骤获取到地面种子点,只是少量的一部分地面特征点,不能代表实际的整个地形情况,因此还需要更多、表现地形情况更为详细的地形特征点。
RiSCAN软件的地形过滤器中,有植被过滤的功能。地形过滤器是基于坡度的滤波算法,其基本思想是在一般地形状况下,地面点与某一邻域内的点之间的高程差应在一个阈值范围之内,超出该阈值的点则被视为非地面点[5];坡度的两个要素——邻域范围和高差阈值,对算法的结果有着重要影响。该算法的关键在于确定函数的阈值,不同的阈值函数代表不同地形的特征信息,可以适应各种不同的地形滤波。并且,为了获取更为精细的地面高程,可以进行多次的迭代滤波。
本研究把所有的种子地面点做初始地面点,引入第一步抽稀去噪后的点云中,进行首次植被滤波。经过多次实验,进行迭代滤波次数为8级,基础网格宽度为0.1 m(即领域范围),最大坡度角为60°时,获取的地面点云最为理想。每次植被滤波设置的基础网格宽度和坡度阈值见表1。
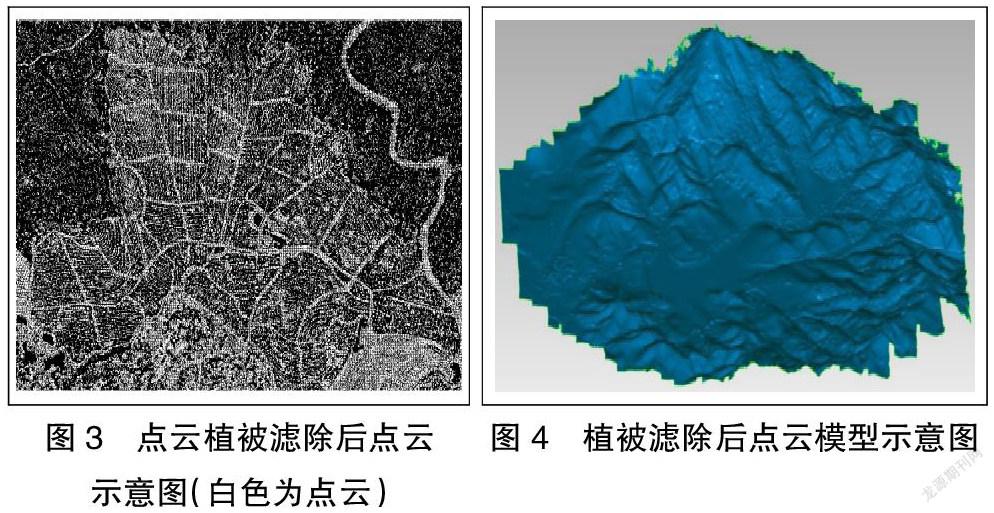
经过植被过滤后点云效果如图3所示,由此可见,通过采用植被过滤算法保留了大量的原始地面点,植被过滤后,点云数量约400万点。
过滤后导入Geomagic软件建模(如图4所示),模型可以比较直观地观察效果:山体比较平滑,非地面点基本上已经滤除干净。
4 成果及精度检测
该项目区植被遮挡严重,无法获取路边等地物的特征点位,因此本研究仍借助RTK,采用差分定位固定解采集离散高程数据的方法获取一定地物的特征点位,融合入处理后的机载LiDAR点云,生成最终的DTM。
为了检测数据误差,本研究现场根据不同植被的覆盖类型,采用RTK单点定位的方法采集一部分地面检测点,下面是检验误差情况。
(1)杧果地实际采集检查点为1 357个,经采用曲面分析工具检查点与面偏离标准差0.27 m,小于1/3等高距(如图5所示)。
说明杧果地激光点高程与地面实测点比较,高程接近,但杧果地是梯田坎,采用5 m格网点DTM数据曲面建模后与原始采集高程点比较发现,个别點误差较大。
(2)山林中实际采集检查点为1 232个,分布在山脊、山谷、山间小路,以及沿着山体中间分别采集两条1.2 km和0.3 km的断面,经采用曲面分析工具检查点与面偏离标准差1.14 m,小于3/2倍等高距(如图6所示)。
本测区经过计算,属于坡度大于25度地区,参照《工程测量规范》(GB 50026—2020)中关于地形类别划分和基本等高线确定的条款规定:地形属于高山地类别,基本等高距为1 m,困难隐蔽地区高程误差可以放宽至3/2倍等高距(见表2)[6]。
5 结论
在本项目中,虽然原始山林植被密集,但是采用综合滤波的方法可以过滤掉绝大多数的非地面点,然后与单点定位测得的特征点位相融合,从而保证DTM数据的质量。本研究发现,机载激光扫描技术在获取植被茂密的山林区地面数据具有巨大的优势,目前它的数据后处理技术和自动分类滤波算法仍然存在一定局限性。经过精度分析发现,误差大的地方一般为山地中坡度剧烈变化的区域,比如坡度陡降而狭窄的山谷,或者有陡坎的冲沟等区域,这些区域仍需深入研究和采用更好的处理方法,以期提高密林区地形变化剧烈区域或地貌断裂地区数据的精度。
参 考 文 献
[1]彭丽.植被密集的陡坡区机载LiDAR数据滤波方法研究[D].重庆:重庆大学,2015.
[2]赵明君,刘超,高翔,等.基于多尺度网格的点云自适应坡度滤波算法[J].合肥工业大学学报(自然科学版),2021,44(2):266-272.
[3]朱笑笑,王成,习晓环,等.多级移动曲面拟合的自适应阈值点云滤波方法[J].测绘学报,2018,47(2):153-160.
[4]周哲.基于LIDAR数据的DLG生产与质量控制技术研究[D].成都:西南交通大学,2012.
[5]郑汉之.基于并行计算的LIDAR数据滤波方法研究[D].成都:西南交通大学,2011.
[6]GB 50026—2020,工程测量规范[S].
猜你喜欢
农业工程学报(2022年10期)2022-08-22
导航定位与授时(2022年4期)2022-08-05
青年文学家(2022年12期)2022-05-18
现代信息科技(2021年21期)2021-05-07
青年文学家(2020年16期)2020-07-13
计算机应用(2016年10期)2017-05-12
诗潮(2017年2期)2017-03-16
计算技术与自动化(2014年1期)2014-12-12
学生天地·小学中高年级(2014年5期)2014-07-24
西安交通大学学报(2009年12期)2009-02-08
