
一种基于工具坐标系的机械臂关节结构参数几何标定方法
2023-12-22 06:47梁晗宇杜凯健
装备制造技术 2023年10期
梁晗宇,杜凯健
(江苏平山交通设施有限公司,江苏 南京 211500)
0 引言
机械臂结构较为复杂,在机械臂作业的过程中,关节运动受到了较大的限制,很容易出现故障或失效,影响整个工序的正常运行。针对此类问题,研究人员设计了多种结构参数几何标定方法。其中,基于指数积的机械臂关节结构参数几何标定方法与基于混合优化算法的机械臂关节结构参数几何标定方法的应用较为广泛。基于指数积的机械臂关节结构参数几何标定方法,主要是结合旋量理论与指数积方法,将机械臂关节结构参数的理论值与实际值进行对应,建立一种关节结构参数约束条件方程[1]。通过变换坐标系,缩小几何标定误差,实现机械臂关节结构参数标定。基于混合优化算法的机械臂关节结构参数几何标定方法主要是利用D-H 矩阵,建立关节坐标转换模型,并针对结构参数的非线性变换[2]。将最小二乘法与模拟退火算法进行混合,实现结构参数高效标定。以上两种方法受到空间变换误差的影响,最终的标定结果与理想值存在一定的差异[3]。因此,本文设计一种新的机械臂关节结构参数几何标定方法。
1 关节结构参数几何标定方法设计
1.1 机械臂关节结构姿态标定测量
从姿态库中随机选取出若干个标定位姿作为初始位姿,通过变换位姿的方式得到结构参数几何标定位姿组[4]。从姿态库中选取需要标定的候选位姿组,从中找出标准的标定测量姿态,计算可观性指标:
式中,Oi为可观性指数;δ1、δ2、δl为机械臂关节结构参数测量姿态辨识的雅可比值;l为结构参数的个数。选择最大Oi附加行块,也就是初始位姿。将初始位姿插入到位姿组中,并从位姿组中剔除一个姿态,使姿态组的标准姿态最大化。当增加姿态与剔除姿态保持一致时,标定测量姿态不再变化,完成姿态标定测量。
1.2 基于工具坐标系标定关节结构参数几何位姿
在姿态标定测量完成之后,根据结构参数几何标定位姿建立工具坐标系,并将机械臂关节的基坐标系作为工具坐标系的参考坐标系,避免关节结构参数几何标定误差。工具坐标系如图1 所示。
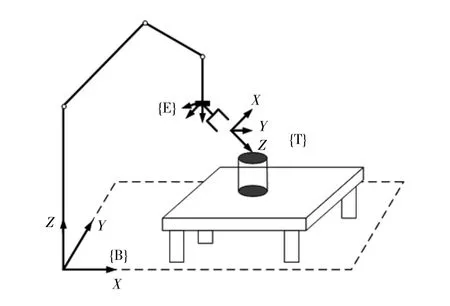
图1 工具坐标系示意
如图1 所示,{E}为末端坐标系;{B}为基坐标系;{T}为工具坐标系。机械臂基坐标系{B}与机器臂末端坐标系{E}是机械臂标定的重要坐标系。{B}能够作为其他坐标系的参考坐标系,描述机械臂关节在基坐标系的位姿;{E}作为{T}的参考坐标系,固定在机械臂末端,随着关节角度的改变而改变。工具坐标系{T}相对于{B}的坐标变换表示为:
利用工具坐标系,对工具中心点与工具坐标系姿态进行标定,并根据标定原理进行坐标系变换,得到:
2 实验验证
为了验证本文设计的方法是否满足机械臂关节结构参数几何标定需求,本文对上述方法进行了实验分析。将文献[1]方法、文献[2]方法以及本文设计方法进行对比。
2.1 实验准备
图2 为实验所用机械臂。

图2 实验所用机械臂示意
本次实验随机选取出1 组10 个机械臂关节,建立机械臂待标定的位姿库,将机械臂在各个关节运动范围内等间距取5 个关节角度值,角度值之间交叉组合,形成多个结构参数。随机选取一个机械臂关节进行位姿变换,并将其结构参数作为初始参数。使用工具坐标系对初始位姿进行拟合,以最小位姿数目为目标函数,得出客观性指数与机械臂末端位姿。整个机械臂操作的过程中,基坐标系、工具坐标系的精度要求较高,末端位姿能够达到实验要求,使结构参数更加有意义。
2.2 实验结果
在上述实验条件下,本文随机选取出1~10 共10个机械臂关节,机械臂关节均能够正常工作。将θ、α作为标定效果好坏的指标,并将文献[1]方法、文献[2]方法以及本文设计方法的θ、α标定值进行对比。标定结果中θ、α标定值与理想值相差越小,标定效果越佳。具体的实验结果如表1 所示。
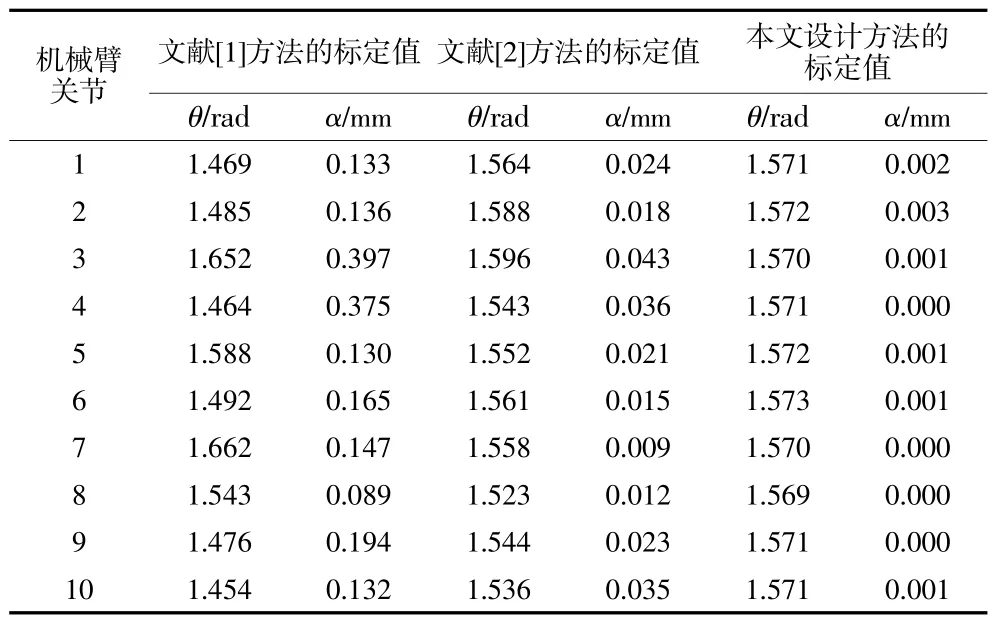
表1 实验结果
如表1 所示,θ为机械臂关节角度参数经过标定后的测量值;α为机械臂关节长度参数经过标定后的测量值。θ的理想值为±π/2(近似为1.571);α的理想值为0 mm。使用本文设计方法之后,θ的标定值在1.569~1.575 rad 的范围内变化,θ的标定值与理想值的误差在0.000~0.002 rad 的范围内变化,θ的标定误差相对较小;α的标定值在0.000~0.004 mm 的范围内变化,α的标定值与理想值的误差在0.000~0.004 mm 的范围内变化,α的标定误差相对较小。而文献[1]方法和文献[2]方法的标定误差较大,由此可见,使用本文设计的方法标定误差相对较小,几何标定效果更佳,符合本文研究目的。
为了进一步验证本文方法的有效性,将位置平行度作为实验指标,位置平行度用于评估机械臂在达到目标位置时的偏差情况,具体可以通过测量机械臂末端执行器实际位置与目标位置之间的差异来评估,假设目标位置的坐标为(0,0,0),则实际位置与目标位置之间的差距如表2 所示。
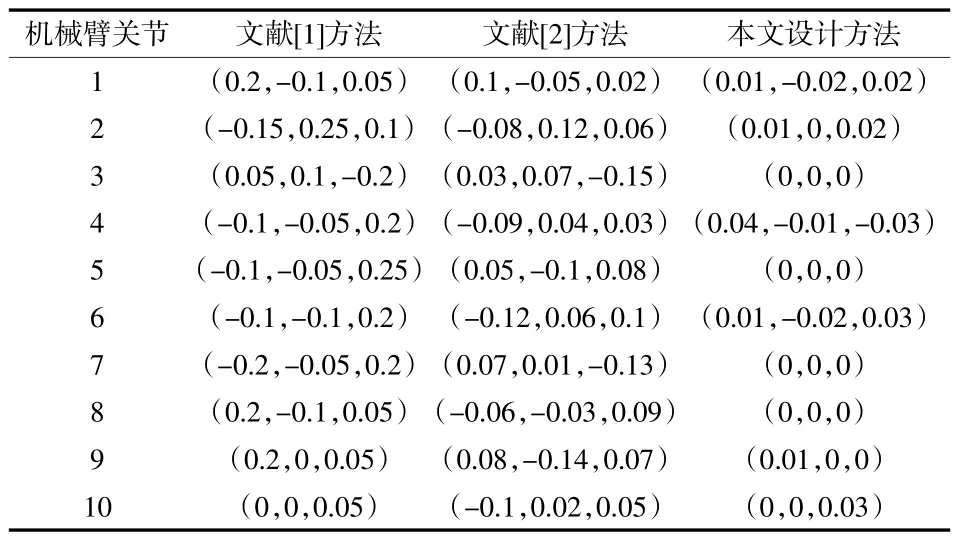
表2 位置平行度实验结果
由表2 中的实验结果可知,文献[1,2]方法的标定结果与目标位置坐标之间的差距较大,而本文方法的标定结果与目标位置坐标之间的差距较小,说明其标定结果精度较高,有利于优化机械臂关节结构参数的准确性。
3 结语
对于机械臂而言,其结构参数至关重要。一个微小的结构误差,均会影响机械臂关节的运行情况,影响作业质量。因此,本文利用工具坐标系,设计了机械臂关节结构参数几何标定方法。从关节结构姿态、标定模型、补偿标定误差等方面,将机械臂关节结构参数进行测量、辨识、标定、补偿,降低关节运动误差,为机械臂的正常作业提供保障。
猜你喜欢
学生天地(2020年3期)2020-08-25
汽车维修与保养(2020年11期)2020-06-09
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
湖北工业大学学报(2016年5期)2016-02-27
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
