
指针式仪表智能识别技术研究
2023-12-22 06:48吴家飞
装备制造技术 2023年10期
吴家飞
(福建林业职业技术学院 园林系,福建 南平 353000)
0 引言
指针式仪表因结构简单,可靠性高,被广泛应用于电力、工业制造等领域[1-2]。由于指针式仪表没有实现数字化,无法直接通过将其示数直接转化为电信号。目前主要读取指针式仪表的方式有人工读取和机器读取两种方式。采用人工进行读取,存在效率低、人工成本大的问题。随着工业化智能化的到来,摄像头、巡检机器人等设备逐渐增多,采用机器替代人工,进行指针式仪表的自动化读取示数,这种方式可以极大提高效率、降低人工成本[3]。
近年来,许多国内外学者基于机器视觉技术对指针式仪表读数展开研究。王欣艺等[4]采用偏移滤波、双边滤波、最大类间方差法选取阈值等方法将图像二值化,然后基于Hough 圆定位仪表盘中心,基于Hough直线提取指针,然后使用CTPN+CRNN 得到最小刻度与最大刻度推算出其余刻度,最后通过角度法计算指针与刻度关系,该方法对较为耗时。该方法在最小或者最大刻度获取失败的情况下无法工作。孙怀远等[5]基于yolo 算法对指针式仪表进行定位,使用透视变换算法进行角度矫正,然后应用几何矩算法遍历得到仪表表盘刻度区域和指针,最后采用角度法得到指针示数。该方法对于圆形仪表具有较好的性能,无法应用于其他形状的仪表。李典等[6]使用SIFT 方法匹配方法对指针式仪表进行定位,通过霍夫圆等方法定位表盘,最后通过角度法获取指针示数。该方法容易受到光照、角度偏移等情况的影响。Liu 等[7]基于Yolov5 实现了指针的快速定位和读取识别,具有较高的识别率和检测效率。但是该方法需要较多的指针式仪表数据完成训练,在缺乏数据的情况,无法达到预期效果。
提出一种指针式仪表的智能识别方法,该方法能够实现指针式仪表的自动读数,在一定程度遮挡、光照、角度偏移影响下也具备较高的识别准确率。
1 系统总体设计
设计的指针式仪表智能识别方法流程如图1 所示。系统总体分别指针检测模块和表计读数模块。其中指针检测模块目的是为了检测出指针式仪表的指针指向的角度,表计读数模块是通过文字识别和角度换算等方法,得到指针指向的角度所代表的示数。在针检测模块中,先将采集的仪表图像进行预处理操作,之后进行自适应阈值得到二值化图像,将二值化图像进行细化处理、边缘检测、霍夫检测,得到指针的指向。在表计模块中,将仪表图像进行文字是识别,得到仪表上刻度示数的坐标,然后把坐标进行角度换算,将指针指向的角度与刻度的仪表角度进行比较,得到识别结果。
2 指针检测
2.1 采集图像
采集图像是指针仪表智能识别的输入图像,采集设备可以是固定摄像头、巡检机器人等设备。采集到的图像,要求清晰,没有杂物干扰,仪表位于图像的中心。如图2 指针式仪表图所示。

图2 指针式仪表图
2.2 预处理
图像的预处理是为了减少噪声干扰,消除无用的信息,这里预处理步骤先将图像进行灰度化,将三通道的彩色图像转换为单通道的灰度图像,然后将灰度化的图像进行高斯滤波,消除图像中的高斯噪声,从而达到降噪的效果[8]。预处理的流程图如图3 所示。
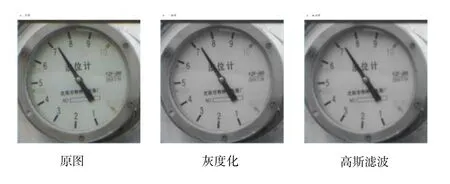
图3 预处理流程图
2.3 自适应阈值
自适应阈值设定阈值的方式是根据像素领域块的像素分布来确定,目的是为了将图中的目标与背景区分开来,该方法好处是,能够阈值自适应,避免了固定阈值的不同输入图像需要设置不同的阈值的问题。
2.4 细化处理与边缘检测
细化处理是为了提取到指针式仪表图像的骨架,能将一个连通区域细化成一个像素的宽度,用于特征提取和目标拓扑表示。
边缘检测是为了提取指针式仪表图像细化后的不连续部分的特征[9]。由于图像的边缘为局部亮度变化最显著的特征,因此进行边缘检测捕捉图像细节十分重要。Canny 边缘检测算法作为一种高效和实用的边缘检测算法,被广泛应用于机器视觉领域,因为本文的边缘检测算法采用Canny 边缘检测算法。自适应阈值、细化处理和边缘检测的指针式仪表图像如图4所示。
2.5 霍夫直线检测
霍夫直线检测可用于检测图像中的直线。它的原理是通过霍夫变换,将坐标空间转换为极坐标空间,然后通过投票的方式进行来确定直线。经过霍夫直线检测后的图像,如图5(a)所示。
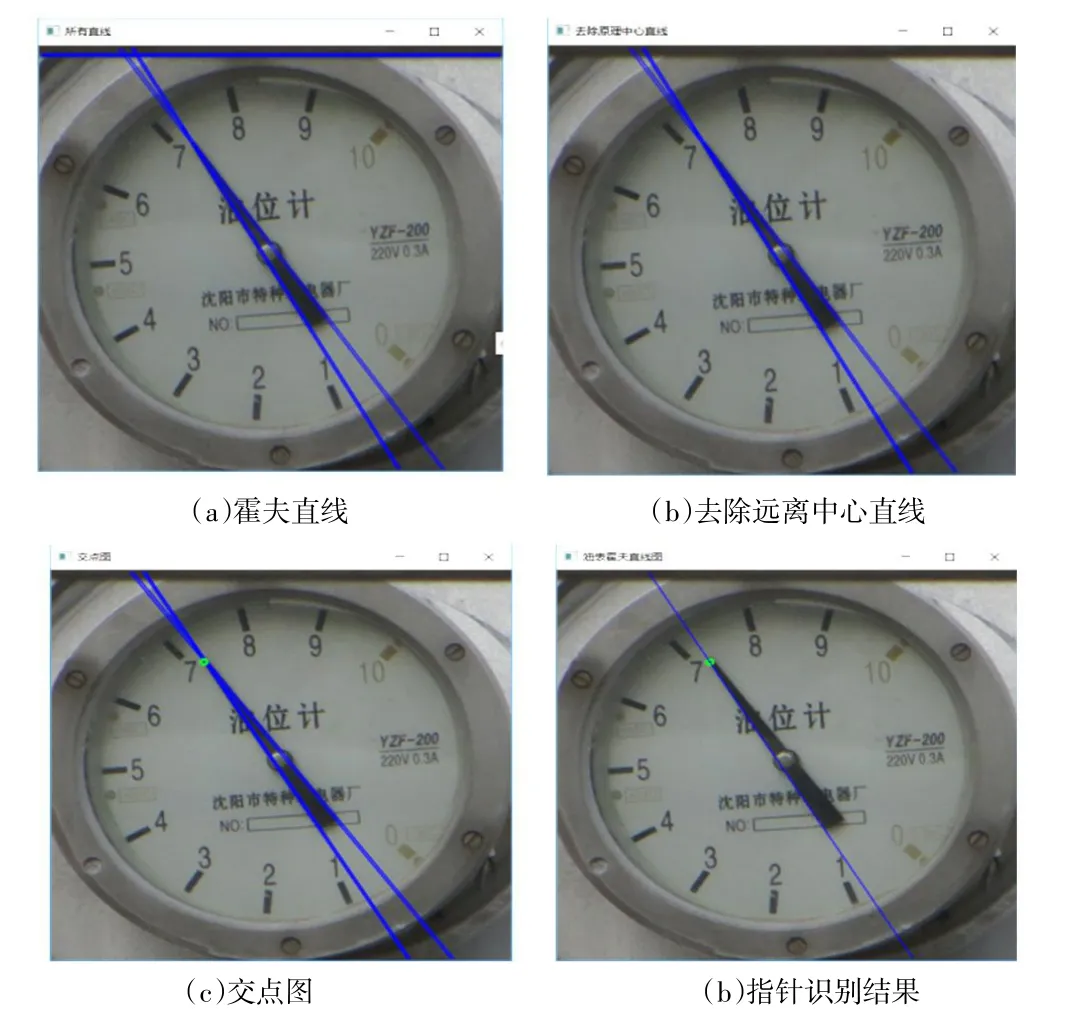
图5 自适应阈值、细化处理、边缘检测图
从图5(a)中可以看到,霍夫直线检测结果除了指针指向的直线外还包含了许多无关直线,因此需要采用一定的策略来去除无关直线。首先可以计算每条直线与中心的距离,将距离中心点较远的直线去除,去除后的图像如图5(b)所示。其次统计最多直线经过的交点,记录此交点,然后去除未经过交点的直线,去除后的图像如图5(c)所示。最后将剩下所有直线的角度进行取平均,得到平均角度,以该角度和前面记录的交点,得到一条唯一的直线,作为指针检测的结果,如图5(d)所示。
3 表计读数
3.1 文字识别
文字识别将输入图像识别为文字的过程。这一步的文字识别是为了找出指针式仪表量程刻度值代表的位置,为后续角度换算提供基础。文字识别采用开源项目https://github.com/chineseocr/chineseocr。项目基于yolo3(You Only Look Once)算法+CRNN(Convolutional Recurrent Neural Network)算法实现。其中yolo3 是一种端到端的图像检测算法,可对输入图像中的文字进行检测。CRNN 是CNN(Convolutional Neural Network)与RNN(Recurrent Neural Network)融合的模型结构。其中CNN 用于特征提取,RNN 用于特征向量预测,CRNN 可将yolo3 检测到的文字进行识别。采用文字识别方法将指针式仪表图进行识别,对最小刻度和最大刻度的位置进行定位,如图6所示。
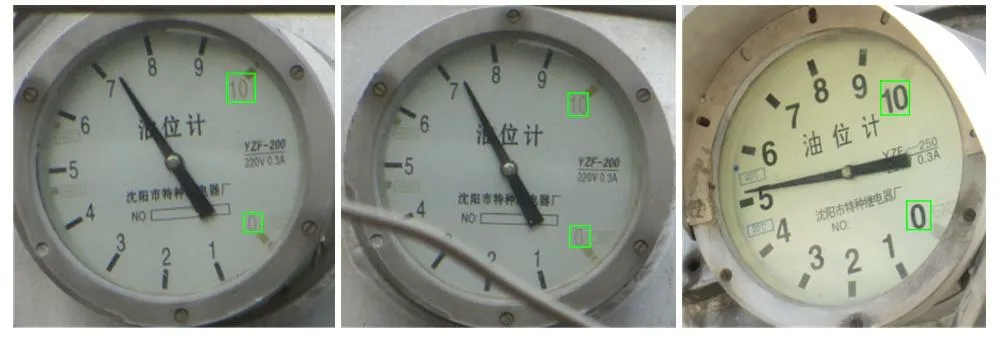
图6 文字识别检测效果图
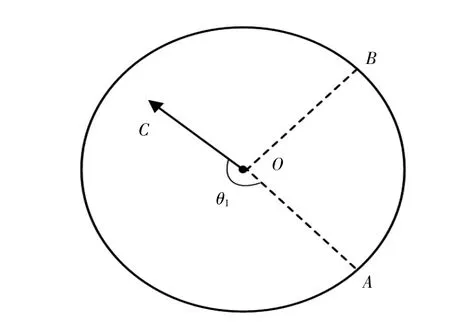
图7 角度法原理
3.2 表计读数
在得到指针角度、最小刻度位置和最大刻度位置之后,只需使用角度法[10],计算最小刻度值与指针的夹角,占最小刻度与最大刻度夹角的比例。最后通过换算,即可得到表计读数,其原理如7 所示。
假设总量程为M,最小刻度为点A,最大刻度值为点B,仪表中心为点O,最小刻度与指针间的夹角,即向量之间的夹角为θ1,最小刻度与最大刻度间的夹角,即之间的夹角为θ,那么表计读数X可通过式(1)计算。
4 实验与结果分析
实验对象为10 张量程0~10 的油位计指针式仪表,共有四种不同情况下的指针式油位计仪表,分别是正常情况下的油位计仪表、部分遮挡的油位计仪表、角度偏移的油位计仪表及不同光照条件下的油位计仪表。其中正常情况下的油位计仪表4 张,部分遮挡的油位计仪表2 张,角度偏移的油位计仪表2 张,不同光照条件下的油位计仪表2 张。
分两部分进行分析,第一部分是指针检测分析,第二部分是指针读数。指针检测对于指针式仪表的读数至关重要,良好的指针检测是指针正确读数的前提。图8 为指正常情况下的针检测的实验效果图,从指针检测效果来看,可以较好的检测出指针。从图9 可以看出,在仪表有部分遮挡、角度偏移、光照影响下,指针检测方法也能够较好的对指针指向进行检测。
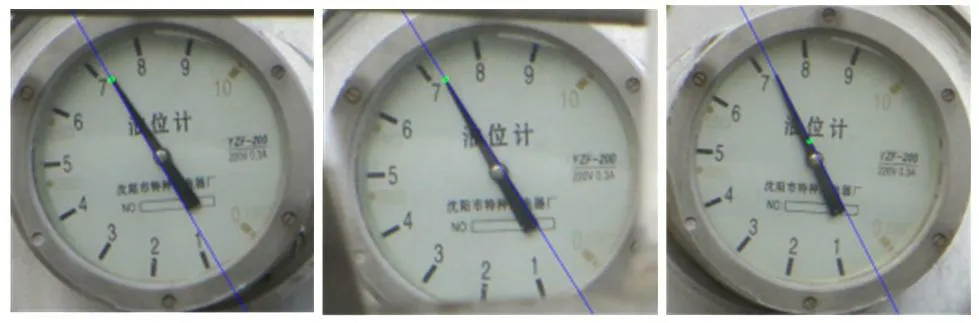
图8 正常情况下仪表指针检测图
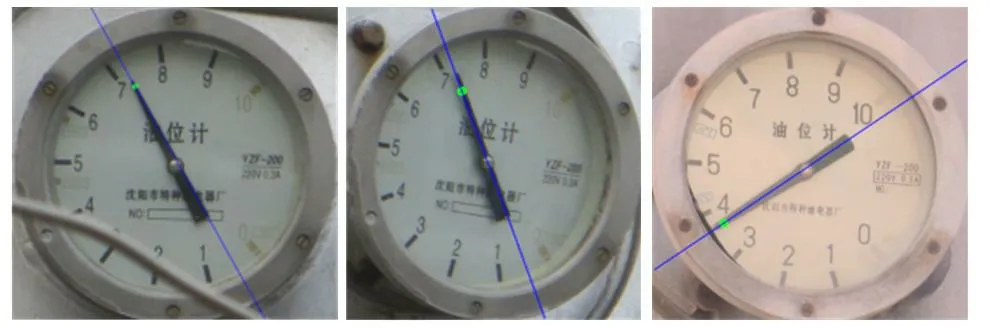
图9 不同情况下仪表指针检测图
在完成指针检测部分之后,则需要进行指针读数部分。表1 为指针读数实验数据统计表。油位计指针式仪表刻度只标注整数部分,小数位部分需要通过人工读取,而通过人工读取的读数也会存在偏差,因此可以定义相对误差不超过5%,则认为该方法是有效的。从表中可以看出,在正常、部分遮挡、角度偏移、光照影响小的情况下,通过本文方法读取的指针示数,与人工读数的相对误差均不超过2%,证明本文的指针式仪表具有一定的有效性和可行性。

表1 指针读数实验数据统计表
5 结语
设计新的指针式仪表智能识别方法是基于图像处理技术对仪表指针进行检测,使用深度学习进行文本检测得到最小量程和最大量程,最后通过角度法计算,得到指针示数。通过实验证明该方法在部分遮挡、角度偏移、一定光照影响下,也能够达到良好的效果,具有一定的鲁班性。但是同时,对光照较弱指针检测失败、仪表模糊导致的文本检测失败等问题,在往后的研究工作中,还需重点关注并加以改进。
猜你喜欢
青海草业(2022年2期)2022-07-23
计算机应用(2021年4期)2021-04-20
电子技术与软件工程(2019年17期)2019-10-09
中国公路(2017年19期)2018-01-23
中国公路(2017年15期)2017-10-16
中国公路(2017年9期)2017-07-25
中国公路(2017年7期)2017-07-24
汽车维修技师(2016年1期)2016-08-12
黑龙江科学(2015年11期)2015-03-27
汽车维护与修理(2015年7期)2015-02-28
