
基于超声波的分布式车辆视野盲区消除装置设计
2023-12-22 06:48孟美含赵存睿
装备制造技术 2023年10期
孟美含,赵存睿,刘 鹏
(泰山科技学院 智能工程学院,山东 泰安 271000)
0 引言
据世界卫生组织(WHO)统计,2022 年全球因交通事故引发伤亡人数至少160 万人。其中,约50 万人因车辆视野盲区问题造成事故[1]。因此,为更好地保护生命财产安全,减少车辆视野盲区成为当前急需研究解决的重要内容。
车辆视野盲区是因车辆固有结构导致驾驶员车内视野受到引擎盖、后备箱、车柱等遮挡,从而出现无法观测区域。其存在问题短时间内不易改变,但可以通过技术手段使驾驶员获得盲区内信息,从而达到消除视野盲区的效果[2-6]。但目前有关视野盲区消除的产品普遍存在有效范围小、使用场景有限及产品价格高昂等问题[7-10]。
针对以上问题,本文设计一种以单片机为控制核心,利用超声波的优异特性,通过分布式安装多个超声波监测单元对盲区进行无死角覆盖,实现多维度车周环绕的视野盲区消除并具有报警功能的装置。
1 装置总体设计与工作流程
本文设计的分布式车辆盲区消除装置以AT89C52单片机为核心,控制监测模块与上位机模块两部分。实现盲区障碍物距离监测与远程报警控制功能。装置系统结构框图如图1 所示。
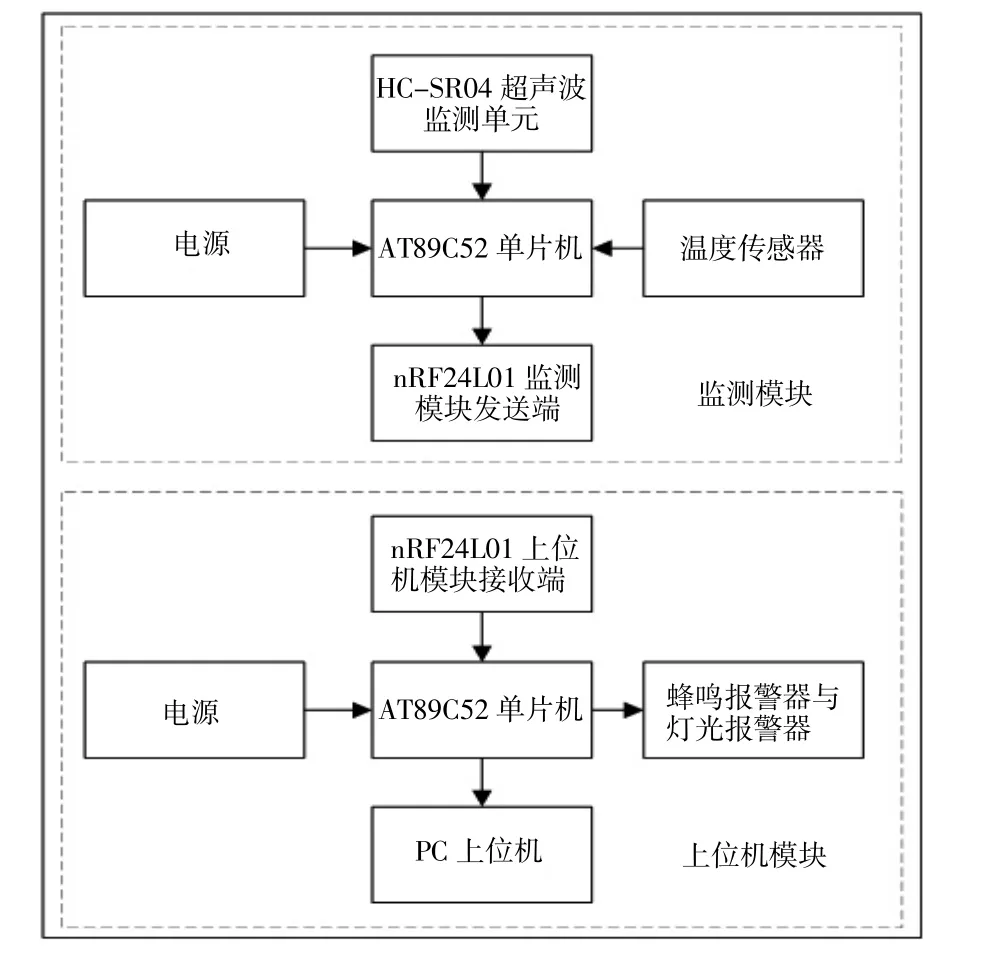
图1 系统结构框架
该装置的监测模块由一个可覆盖约15°~30°的视野区域的超声波单元、AT89C52 单片机核心、nRF24L01 从端组成。上位机模块由AT89C52 单片机、nRF24L01 主端、PC 显示屏、蜂鸣报警器与灯光报警器组成。装置总电路原理如图2 所示。
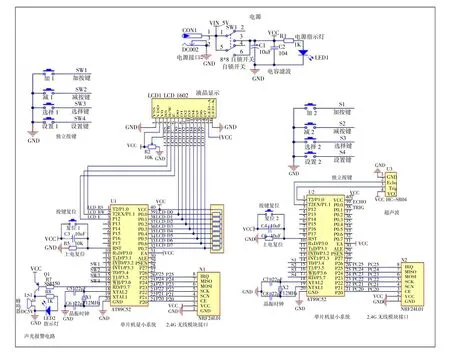
图2 装置电路原理
当装置启动后,监测模块与上位机模块的nRF24L01 开始建立无线通讯,通讯成功后,监测模块AT89C52 单片机激励超声波单元发出超声波信号。超声波监测范围内出现的障碍物时会反射超声波形成回波,超声波单元接收回波信号后,经过滤电路与放大电路将超声波传播时间输入单片机,单片机通过公式计算得到障碍物距离,对比如表1 的程序预设危险分级表确定障碍物危险等级,确定控制指令。
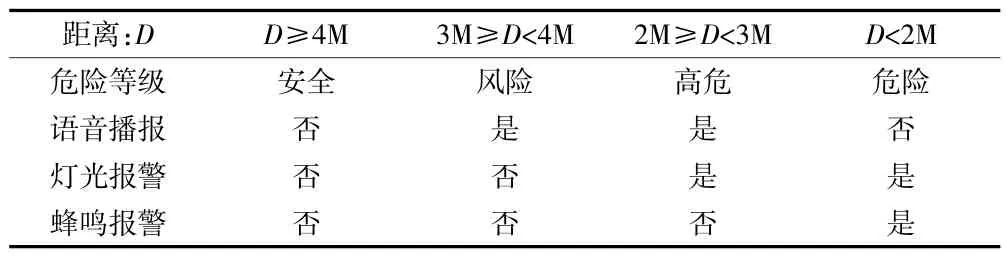
表1 安全等级划分
在确定控制指令后后,将结果通过nRF24L01 从端无线传输至上位机模块nRF24L01 主端。接收后输入上位机AT89C52 单片机。根据输入指令,单片机驱动语音、蜂鸣器、LED 灯进行报警,提醒驾驶员障碍物接近,注意安全。
2 装置硬件设计
2.1 AT89C52 单片机模块设计
本装置使用两个AT89C52 型8 位低功耗高性能单片机作为控制核心。该单片机采用标准C51 内核/具备8K 可用于系统内编程FLASH 存储器,时钟频率0Hz~24 MHz,32 个可编程I/O 口线,3 个16 位定时/计数器,2 个可编程URAT 串行通道,支持低功耗空闲与掉电保护。
该装置由单片机XTAL1 与XTAL2 引脚外接12 MHz 晶振电路,RST 引脚外接复位电路,组成单片机最小系统。其中监测模块P0.0 接HC-SR04 Trig 引脚,P0.1 接Echo 引脚,用于激励超声波单元与接收回波时间数据。上位机模块通过RS-232 总线通讯与单片机或触摸屏连接。
2.2 超声波模块设计
超声波一般指频率超过20 kHz,不在人类听觉范围内的一种弹性机械振动波,依靠介质进行传播。与人的可听声相比,超声波在接触不同介质分界时会产生显著反射,根据此原理可进行超声波测距。如图3 测距原理图所示。
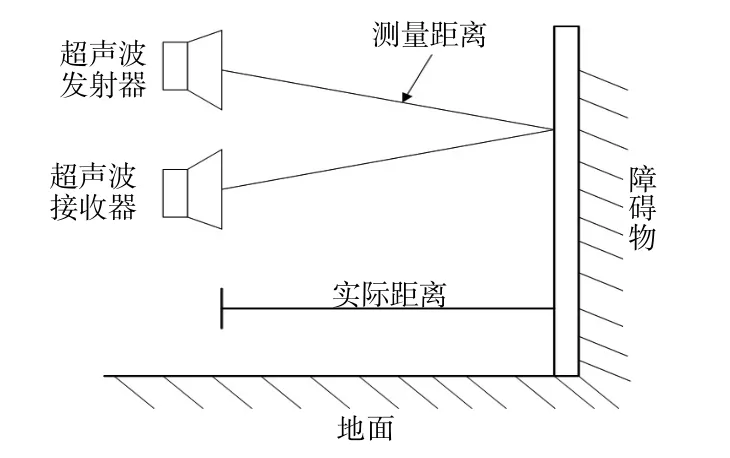
图3 超声波测距原理
除超声波外,目前市场主流测距传感器还包括激光、红外线、CCD 电荷耦合等。各传感器性能有较大区别,主要性能对比如表2 所示。
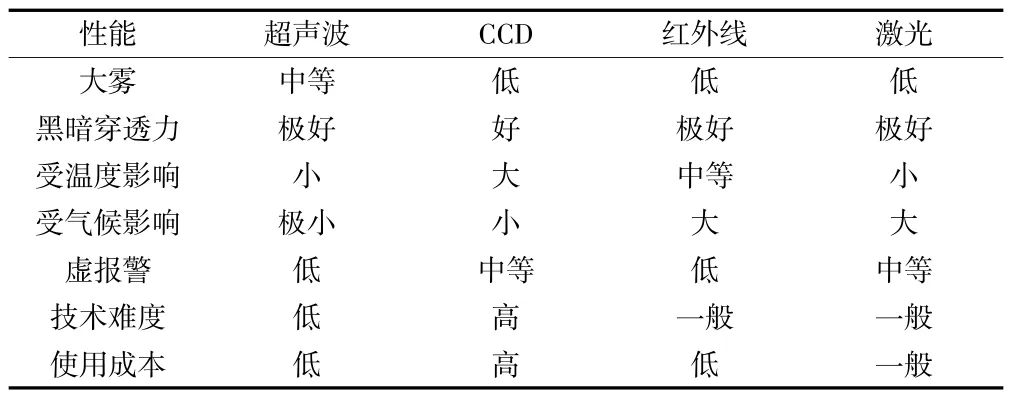
表2 传感器性能对比
由表2 可知,超声波受色彩、外部光线、环境影响较小,技术难度与成本也相对较低。在灰尘、夜间、雾霾等特殊环境下测量结果均有显著优势。除此之外,超声波传播速度稳定,能实现非接触式无损测量,具有高分辨率与强指向性,低衍射性与强穿透性等优点。非常适合车辆盲区监测对准确度、覆盖率、有效距离、安全性的需求。
由于超声波的测量精度与指向性有关,波束宽度又是指向性的展现,该数值越小则指向性越好。因此根据公式(1)所示,可以通过改变频率等提高指向性。
式中:c代表超声波传播速度;R代表声波发射源直径;f代表声波频率。
由式(1)可知,当频率越高指向性将越好,但过高频有声波衰减问题。因此在实际应用中需要选择合适频率以保证指向性与衰减性的平衡。经式(1)计算与考虑实际应用环境,本装置选择40 kHz 作为使用频率,选择HC-SR04 一体型超声波测距模块作为装置的超声波单元。其主要电气参数见表3。
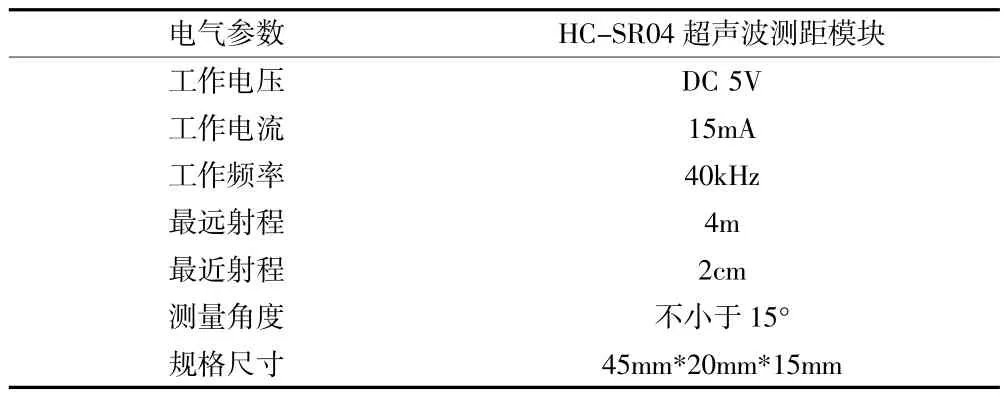
表3 超声波测距模块电气参数
HC-SR04 体积小巧,简单易用,广泛应用于避障、测距、液位监测等领域,检测精度最高可达3 mm。其引脚电路如图4 所示。
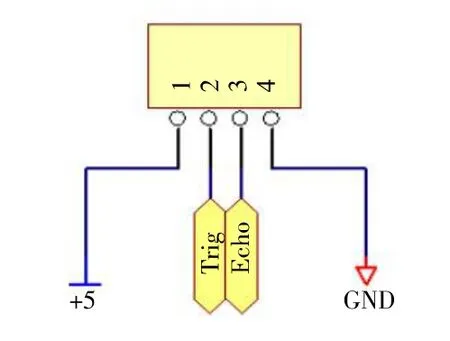
图4 HC-SR04 引脚电路
其中:VCC 接+5 V 电源;GND 为接地端;Trig 为触发端;Echo 为回应端。
在使用过程中,Trig 接入单片机P1.0 引脚,Echo接入单片机P1.1 引脚。当通过I/O 口向Trig 输入至少10 μs 高电平信号后,模块便可自动发射8 个40 kHz方波,同时Echo 将保持高电平直至检测到返回信号。Echo 高电平持续时间即为超声波传播时间t,通过公式(2):
式中:L代表探头间距;D代表超声波传播速度;t代表超声波传播时间。
通过上式进行计算,即可得到超声波传播距离,用于后续危险分级计算。
2.3 无线通讯模块设计
本设计选用nRF24L01 型无线射频收发器,运行频率2.4~2.5 GHz,使用ISM 频段。融合增强型ShockBurst 技术,可通过内部程序配置通讯频段与输出功率。
运用其多对一通讯与点到多点通讯地址控制功能。将上位机模块nRF24L01 设置为PRX 主接收模式,各监测模块nRF24L01 设置为PTX 主发射模式。连接单片机并配置CE、CSN、IRQ 引脚和SCK、MOSI、MISO 引脚的SPI 配置。在设置过程中,需要特别注意TX_PLOAD_WIDTH 和RX_PLOAD_WIDTH 在主从端的代码宏定义值是否相等。
2.4 显示报警模块设计
上位机显示报警模块包含LCD 显示屏,语音模块,蜂鸣器与灯光模块。显示屏选择INNOLUX WES07 型LCD 显示屏。显示屏大小为7 英寸,支持触摸控制,用于显示监测区域与报警信息。语音报警模块选用ISD1820 型语音模块。支持最大20 s 单次录制时长与外接SD 卡存储。报警模块采用5 V 蜂鸣器与LED 灯,其电路如图5 所示。
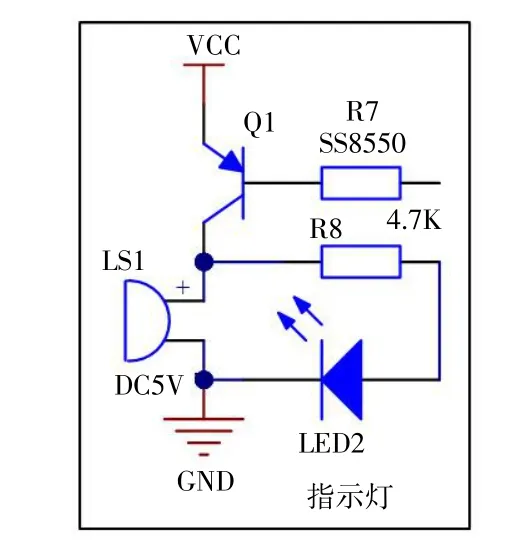
图5 蜂鸣器电路原理
3 系统软件设计
本设计采用C 语言完成单片机编程任务。实现监测模块超声波测距、障碍物距离计算、危险分级功能与上位机模块报警控制、上位机显示功能。其中监测模块软件任务流程如图6 所示。
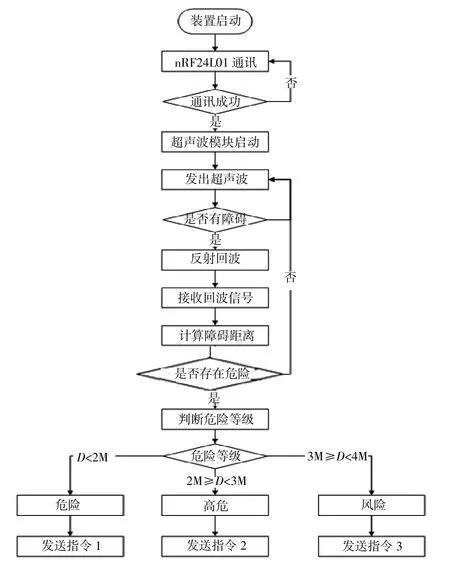
图6 监测模块任务流程
上位机模块软件任务流程如图7 所示。
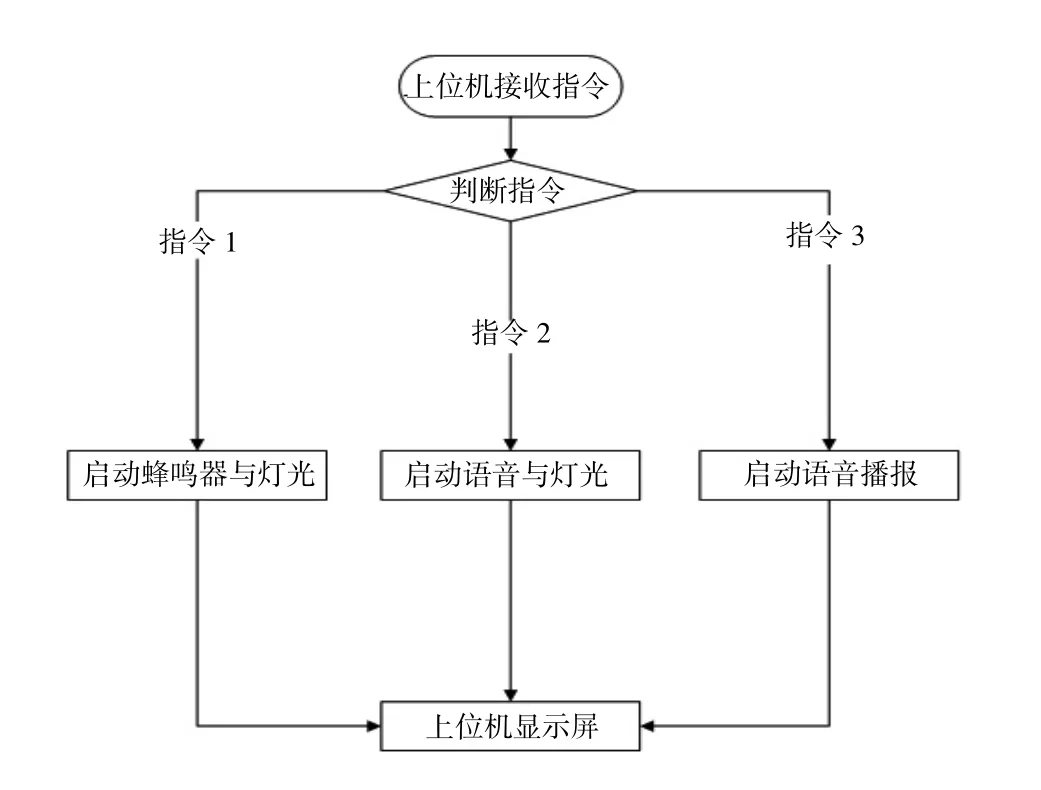
图7 上位机模块任务流程
4 系统仿真
本装置采用Proteus 软件进行仿真,使用LCD1602液晶屏代替上位机屏幕,由于软件限制,HC-SR04 最大模拟距离为2.9M,仿真中通过控制滑动变阻器模拟HC-SR04 监测距离改变。
搭建完成后,向监测模块与上位机模块单片机分别烧录hex 程序,部分程序如图8 至10 所示。
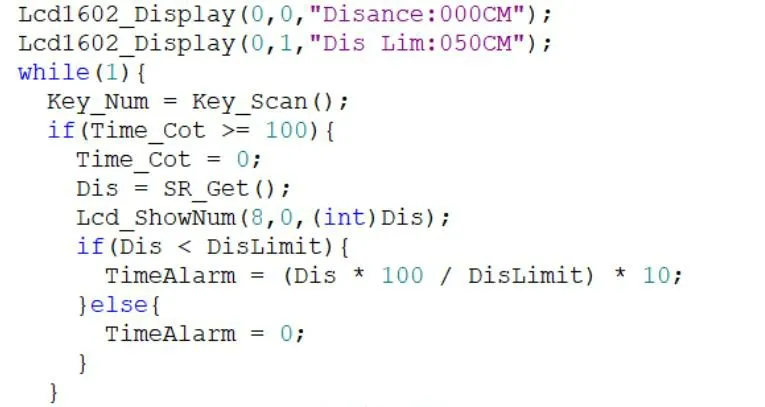
图8 显示初始化程序
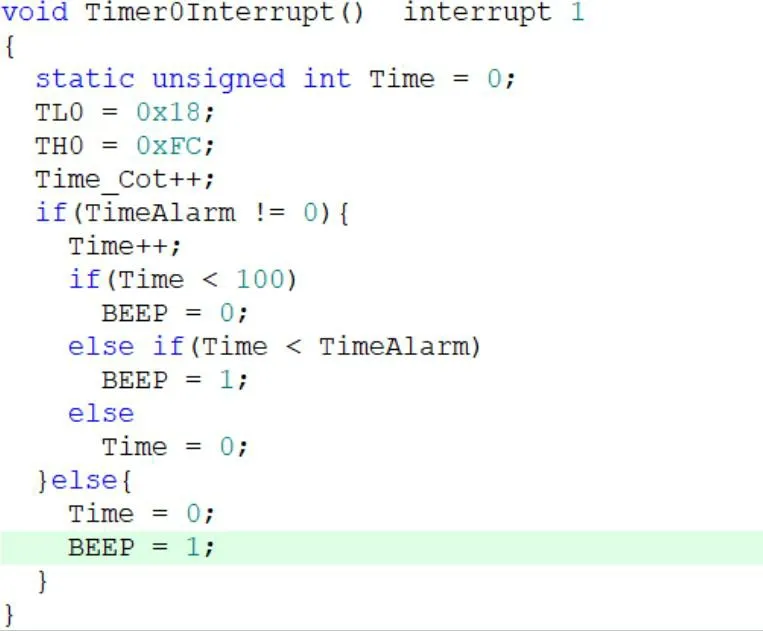
图9 中断入口函数程序
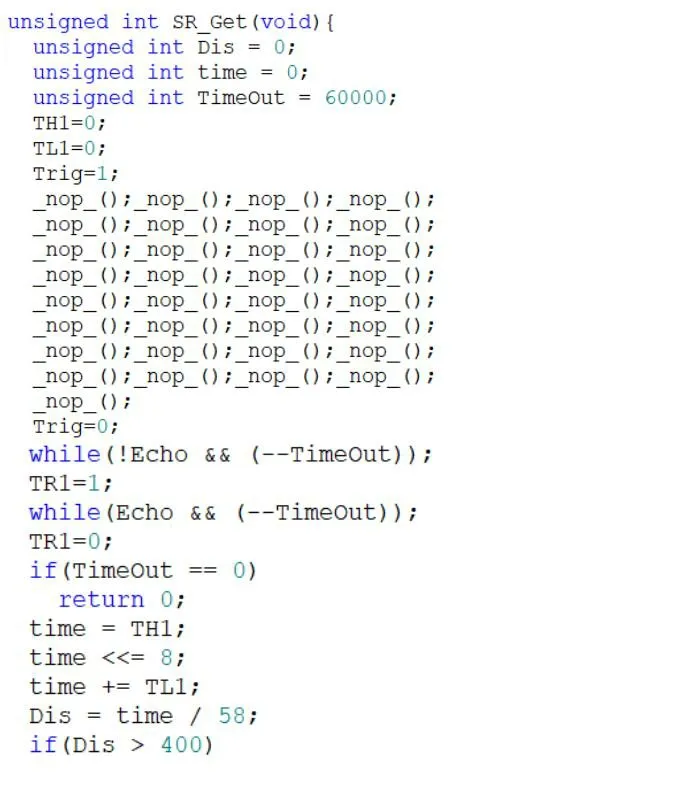
图10 超声波测距程序
调节HC-SR04 滑动变阻器,模拟障碍物距离的改变,观察输出端液晶屏显示数据与报警系统响应,实验结果如表4 所示。
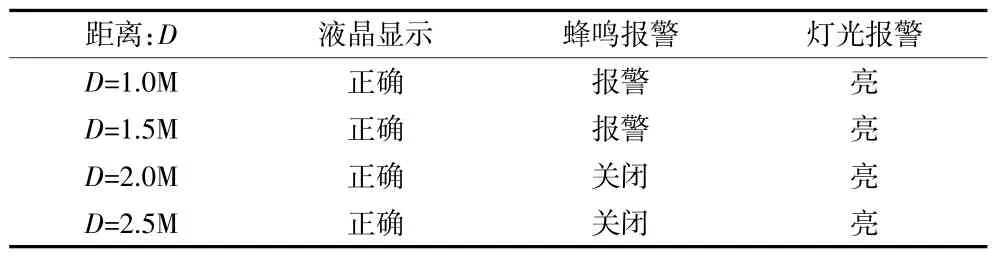
表4 仿真实验结果
5 结语
为消除车辆视野盲区的存在,本文设计一种以AT89C52 单片机为核心的装置,该装置利用多个分布安装的超声波测模块检测障碍物,按照距离划分安全等级,然后通过无线通讯实现上位机控制多重报警。在具体应用方面,本设计整体构型简单、功能合理、性价比高,可根据需求不同换装不同规格超声波模块进一步提升检测性能。
猜你喜欢
趣味(数学)(2022年4期)2022-07-02
科学(2020年3期)2020-01-06
铁道通信信号(2018年12期)2019-01-31
车迷(2018年12期)2018-07-26
资源再生(2017年4期)2017-06-15
电子制作(2017年7期)2017-06-05
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
中国卫生(2015年5期)2015-11-08
学习月刊(2015年3期)2015-07-09
