
用于手部康复的热塑性聚氨酯软体驱动器研究
2023-10-11 09:41刘彩霞潘亭亭孙一帆
合肥工业大学学报(自然科学版) 2023年9期
刘彩霞, 潘亭亭, 孙一帆, 马 菲, 黄 英
(1.合肥工业大学 物理学院,安徽 合肥 230601; 2.合肥工业大学 微电子学院,安徽 合肥 230601)
使用康复训练手套已成为医疗康复领域中辅助治疗手功能障碍患者的方法之一[1],传统康复训练手套[2]大多由刚性材料制成,与人手交互时的安全性大大限制其在医疗康复方面的应用。随着仿生技术、新型柔性材料、3D打印技术快速发展,软体机器人[3]应运而生,软体康复训练手套也成为众多研究者关注的热点。软体康复训练手套核心部件是由软材料制作的软体驱动器,具有刚度小、柔顺性高等特点[4],可以提供比刚性康复训练手套更安全的交互形式,使得软体驱动器成为康复训练手套的理想选择[5]。
众多研究者研制软体驱动器时,硅橡胶是最常用的柔性材料。文献[6]通过引入纤维增强方式研制一种可弯曲、延伸和扭转的气动软体驱动器,并将其应用于手部康复训练;文献[7]提出一种用于手功能康复的圆环加箍型的气动式软体驱动器;文献[8]提出一种嵌套结构手指康复软体驱动器。这些软体驱动器在驱动过程中弯曲轨迹与实际的人手运动轨迹不符。文献[9]研制一种双分段的软弹性复合驱动器,并基于此制作了软体康复训练手套;文献[10]提出一种内嵌气囊式分段式气动软体驱动器,增加了手指与软体驱动器之间贴合度。尽管这些软体驱动器采用了分段式设计,但是每个关节不能独立弯曲,灵活性有限。此外,这些软体驱动器均采用硅橡胶材料制作而成,制作流程复杂,往往需要多步才能成型,而且硅橡胶材料相对较大的材料质量和较小的材料刚度导致软体驱动器具有较低的辅助力,妨碍其在实际应用中的效用。
针对上述问题,本文设计了基于柔性热塑性聚氨酯(thermoplastic polyurethane,TPU)的3种用于不同手指康复的分段式独立驱动的气动软体驱动器。该分段式软体驱动器由2种具有波纹管气腔的软关节(单、双向软关节)组成,使用低成本的桌面级熔融沉积制造(fused deposition modeling,FDM) 3D打印机和TPU直接打印而成,制作步骤简单。通过有限元建模获得TPU材料的最佳本构模型,仿真分析软关节和软体驱动器特性。对软关节和软体驱动器弯曲性能、运动轨迹、抓握能力等进行测试。通过集成5个软体驱动器制作康复训练手套,成功地带动手指进行康复训练,完成多个抓取任务。
1 结构设计
1.1 人手关节结构分析
人的手指主要由关节、指骨及其周围软组织构成,依靠肌腱屈伸驱动关节转动。关节包括掌指关节、近端指间关节、远端指间关节,拇指有近节、中节2节指骨,其余手指为近节、中节和远节3节指骨。掌指关节为双轴向关节,可实现屈伸、外展、内收运动,其余关节只可做屈伸运动,各关节运动范围见表1所列[11],掌指关节可达到一定后伸角度,在手指运动中至关重要。因此,为达到手指康复训练目的,不能仅依靠弯曲运动带动手指进行康复训练,需要设计符合人类手指结构和运动规律的软体驱动器。

表1 人手各关节的运动范围
1.2 软体驱动器结构设计
软关节和软体驱动器结构设计如图1所示。
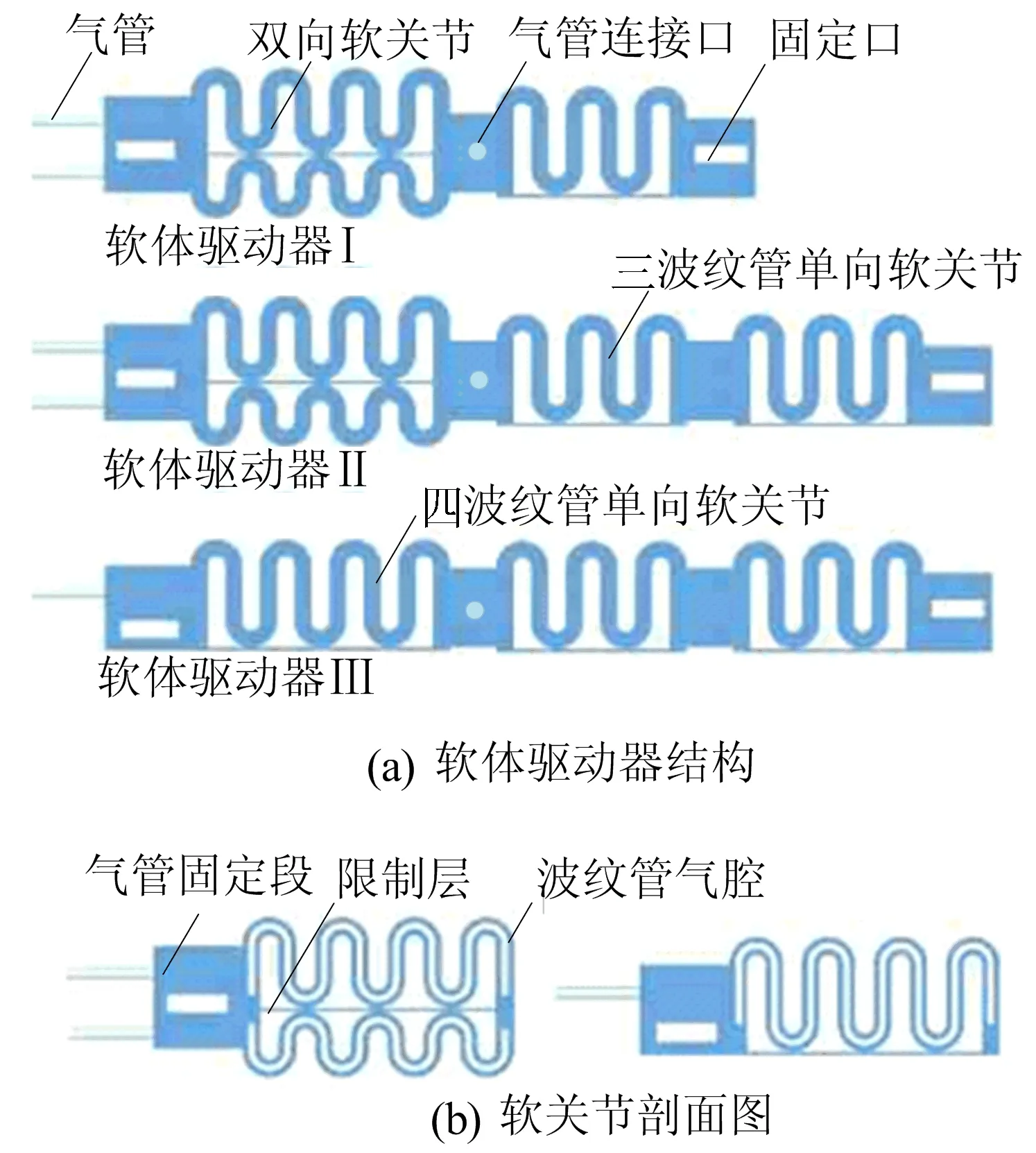
图1 软关节和软体驱动器结构设计
日常生活中每根手指功能占比不同。拇指占手功能36%,食指和中指各占18%,无名指和小指各占9%[12]。因此,基于手指关节分布及运动规律,设计3种用于不同手指康复训练的分段式独立驱动的软体驱动器(图1a)。软体驱动器Ⅰ由1个双向软关节和1个三波纹管单向软关节组成,用于辅助大拇指进行康复训练。软体驱动器Ⅱ由1个双向软关节和2个三波纹管单向软关节组成,用于辅助食指和中指屈伸。软体驱动器Ⅲ由1个四波纹管单向软关节和2个三波纹管单向软关节组成,用于辅助其他2根手指。为让软体驱动器能够更好贴合手指形状采用分段设计;为增加软体驱动器灵活性,采用独立驱动方式,在固定段侧面设置一个气管连接口,便于独立驱动单向软关节弯曲(图1a)。考虑到后续软体驱动器装配到手套上,在软体驱动器两端各设置1个固定口便于固定魔术贴。软体驱动器Ⅰ、Ⅱ、Ⅲ的长度分别为102、139、147 mm。
单、双向软关节结构剖面图见图1b,双向软关节包括2个波纹管气腔、中间限制层、气管固定段和2个气管,下层波纹管高度小于上层。单向软关节由波纹管气腔、底层限制层、气管固定段和1个气管组成。充气时,波纹管气腔会趋向伸直,限制层约束使软关节弯曲。单向软关节只可向下弯曲,而双向软关节可向上下2个方向弯曲,向上弯曲角度小于向下弯曲角度。
2 有限元分析
2.1 TPU材料本构模型
TPU是柔性聚氨酯材料,与橡胶有相似特性,具有高弹性、耐磨性、撕裂强度、耐化学性和广泛温度兼容性等[13]特点。试验用TPU材料购于长沙易泰龙高新材料有限公司,邵氏硬度为75A。使用ZQ-990万能试验机(东莞市智取精密仪器有限公司)对75A TPU材料进行拉伸试验,以100 mm/min速度拉伸获得应力、应变数据,对75A TPU的应力、应变数据和4种(Ogden、Yeoh、Mooney-Rivlin、Neo Hooke)不同超弹性模型[13]进行拟合,在ABAQUS/CAE中建立材料模型,导入拉伸试验获得的数据,应用最小二乘法拟合,结果如图2所示,选取Ogden模型作为75A TPU最佳本构模型。

图2 75A TPU的材料本构模型拟合
2.2 有限元仿真
用Ogden模型对软关节和软体驱动器进行有限元仿真。对单向和双向软关节有限元应力与变形进行分析,仿真云图如图3a、图3b所示,气腔内施加压力时,应变集中在波纹管气道,波纹管气道膨胀展开,软体驱动器整体增长,限制层约束导致软体驱动器弯曲。向四波纹管单向软关节施加压力,软关节只向下弯曲;向双向软关节下波纹管气腔施加压力,双向软关节向上弯曲;向上波纹管气腔施加压力,双向软关节向下弯曲。对3种软体驱动器进行有限元仿真,软体驱动器Ⅰ、Ⅱ、Ⅲ仿真云图如图3c~图3e所示,从图3c~图3e可以看出,3种软体驱动器单、双向软关节可实现独立驱动,在弯曲过程中运动轨迹与人手运动轨迹符合。
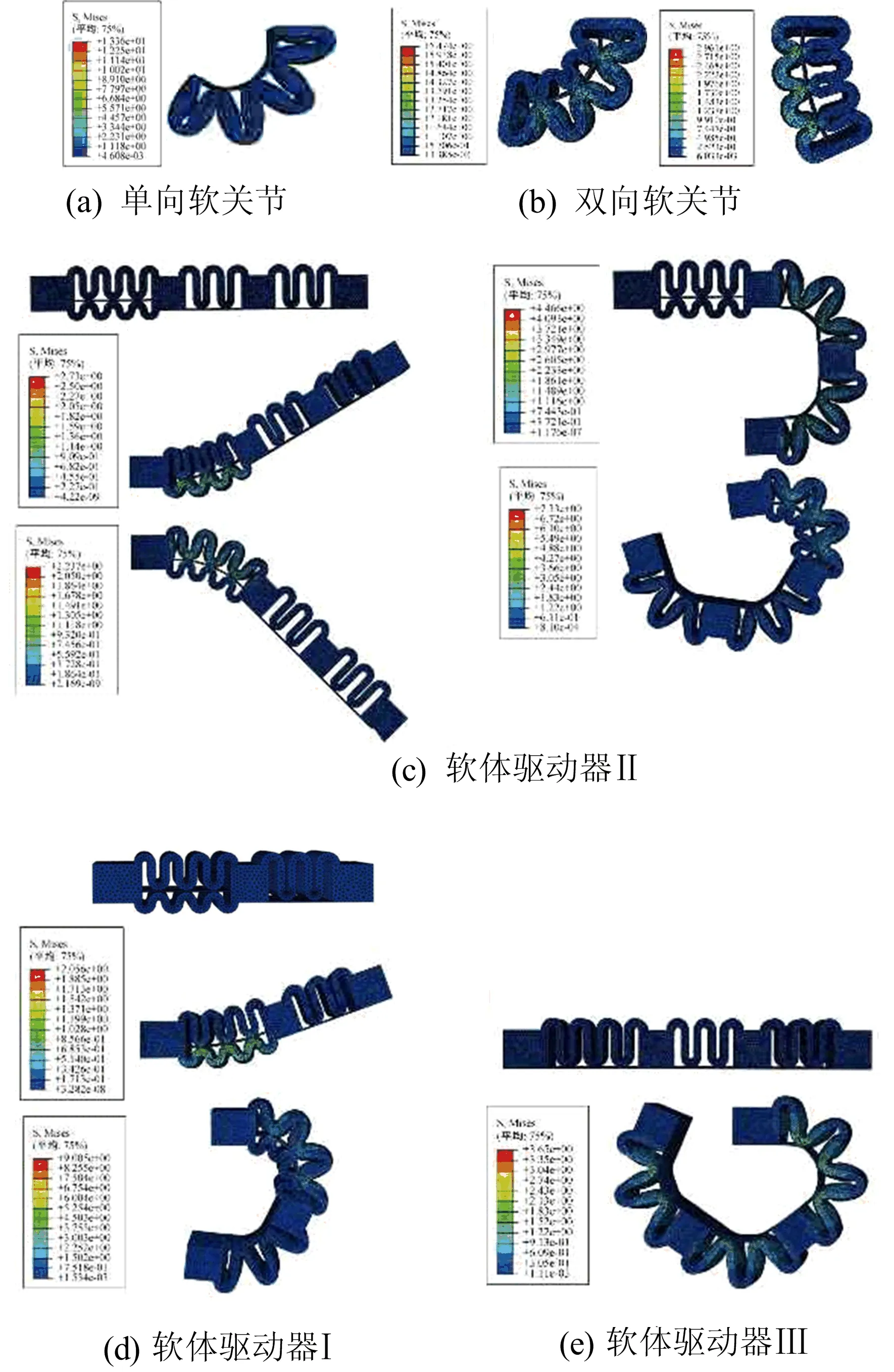
图3 软关节和软体驱动器仿真云图
3 软体驱动器制作与测试应用
3.1 软体驱动器制作
软体驱动器使用FDM 3D打印机和柔性TPU进行直接打印,制作工艺简单。利用3Dmax软件建立软关节和软体驱动器模型,在Cura软件中进行切片并导出.gcode文件。为解决3D打印软体驱动器时无法使用支撑结构存在的问题,确保3D打印的软体驱动器气密性,对Cura软件中3D打印参数进行多次调整,调整3D打印参数见表2所列。3D打印的软关节如图4a所示,在气压驱动下软关节呈现不同程度弯曲,气密性好。3D打印的软体驱动器如图4b所示,不同结构软体驱动器可应用到不同手指。

图4 3D打印的软关节和软体驱动器

表2 TPU(75A)的3D打印参数
3.2 特性测试
软关节作为软体驱动器基础部件,直接反映软体驱动器特性,将软关节一端垂直固定进行特性测试,施加0~100 kPa气压,步长为10 kPa,在每个气压下,记录其弯曲角度,结果如图5a所示。随着气压增加,软关节弯曲角度随之增加,四波纹管单向软关节弯曲角度能实现0~260°变化,三波纹管单向软关节弯曲角度能实现0~180°变化,双向软关节弯曲角度能实现-60°~160°变化,弯曲角度均能满足手指弯曲所需角度。对软关节进行握力测试,如图5b所示。打印2个测试握力硬质支架,通过正方体支架将软关节固定在万能试验机下夹具,在上夹具固定1个直径15 mm圆柱体。逐渐向软关节充入气体,软关节弯曲并夹持住圆柱体,以0.5 mm/s速度向上拉动圆柱体,测量软关节在整个拉动过程中握力,直到其失去对圆柱体抓握。双向软关节握力如图5c所示,其上波纹管和下波纹管在100 kPa时可达到最高握力,分别为4.4、3.0 N。单向软关节握力如图5d所示,四波纹管和三波纹管单向软关节在100 kPa时可达到最高握力,分别为6.5、5.5 N。
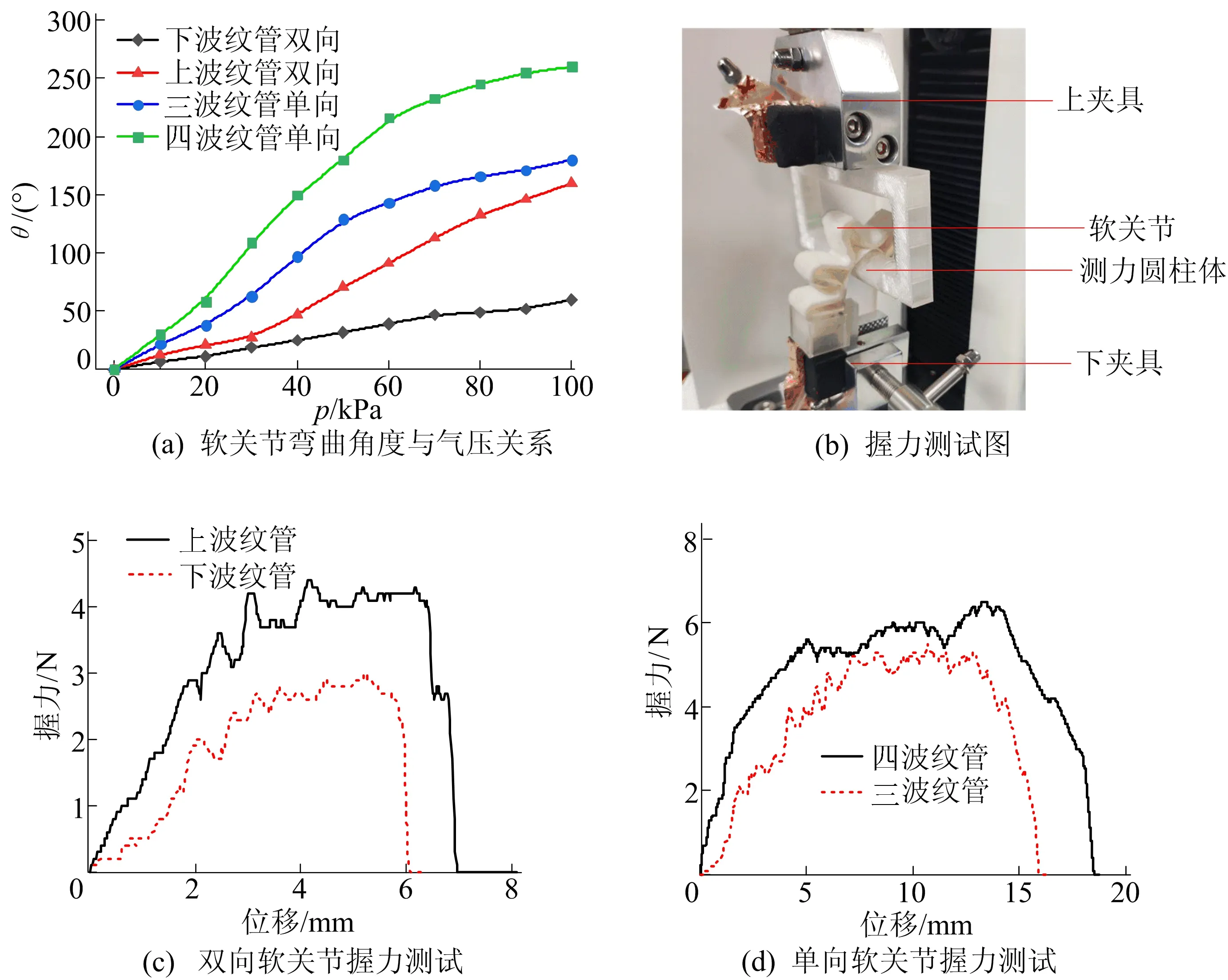
图5 软关节特性测试结果
为测试软体驱动器特性,在坐标纸上记录3种软体驱动器在不同气压下弯曲轨迹和末端点运动轨迹,施加0~100 kPa压力,步长20 kPa,结果如图6a~图6c所示。

图6 软体驱动器特性测试结果
不同气压下,软体驱动器表现出不同弯曲状态,与手指弯曲轨迹类似,软体驱动器可以很好地贴合人体手指表面。软体驱动器运动轨迹与插图仿真结果相同,验证了仿真结果的正确性。使用直径为50 mm的圆柱体对这3种软体驱动器进行握力测试,测试方法与软关节握力测试方法相同,结果如图6d~图6f所示,在100 kPa最高握力分别为9.2 N(软体驱动器Ⅰ)、10.5 N(软体驱动器Ⅱ)和11.5 N(软体驱动器Ⅲ),3D打印TPU制作的软体驱动器辅助力强,具有较强的实用性。
3.3 软体康复训练手套应用
软体驱动器集成在一个织物手套上制作软体康复训练手套,如图7所示。
软体康复训练手套可驱动拇指和食指弯曲,具有对手指进行康复训练的能力。为观察该软体康复训练手套抓取性能,实验抓取胶带、木块、黑板擦等不同大小物体,质量分别为154、87、34 g。结果表明,软体康复训练手套可以辅助人手完成康复训练以及常见物体抓取。
4 结 论
本文提供了一种3D打印TPU的参数,根据设计的单、双向软关节结构,直接3D打印TPU,制备了3种用于不同手指康复训练的分段式软体驱动器,简化了软体驱动器制作流程。软关节和软体驱动器弯曲能力和握力测试显示,设计的软体驱动器弯曲轮廓与人手弯曲相符,在100 kPa下最高握力分别为9.2 N(软体驱动器Ⅰ)、10.5 N(软体驱动器Ⅱ)和11.5 N(软体驱动器Ⅲ),与硅橡胶制作的软体驱动器相比,该软体驱动器握力高、质量轻。将软体驱动器用于康复训练手套,可满足日常生活的康复训练和抓握需求,为手功能损伤患者提供一种更加安全有效的康复训练设备。
猜你喜欢
养生月刊(2022年5期)2022-11-26
现代临床医学(2022年5期)2022-09-28
水道港口(2022年2期)2022-07-04
纺织科学研究(2021年6期)2021-12-02
数学小灵通(1-2年级)(2021年9期)2021-10-12
上海交通大学学报(2021年2期)2021-03-02
军事文摘(2020年24期)2020-11-29
家庭医药·快乐养生(2019年2期)2019-03-04
江西社会科学(2018年8期)2018-08-29
文体用品与科技(2016年5期)2016-04-08
